(Updated 12th January 2021)
Floating debris from the crashed flight MH370 has been found and reported to the authorities in 22 locations throughout the Southern Indian Ocean (SIO). A total of 33 items drifted to these locations from the crash site, over a 3 year period. In a previous paper entitled “The Final Resting Place of MH370”, which I co-authored with Bobby Ulich, Victor Iannello and Andrew Banks, we analysed the MH370 flight path from Kuala Lumpur, Malaysia to a last estimated position of 34.2342°S 93.7875°E in the SIO, based on satellite, radar, weather, fuel and aircraft performance data. The purpose of this new paper is to determine the MH370 crash location using an analysis of the oceanic drift of these debris items, independently from any other data.
The MH370 crash location was 34.13°S ± 1.06° near the 7th Arc at a longitude around 93.98°E and the search area is defined as a circle with a radius of 65 nm centred on the crash location.
The updated paper can be downloaded here
@DennisW
As I stated in my drift paper: “The CSIRO data additionally uses the actual surface wind and wave data, supplied by the European Centre for Medium-Range Weather Forecasts (ECMWF), US National Oceanic and Atmospheric Administration (NOAA) and the Australian Bureau of Meteorology (BoM).”
The model accounts for drift due to the current speed and direction, stokes drift due to the wave height and direction and windage due to the wind speed and direction in real time at each location that each of the 86,400 trials is to be found on each day for 1,030 days starting at midnight on 8th March 2014.
I am at a loss as to why you say “The trial conditions can never replicate the conditions present at the time of the event.” The model uses the data for the actual conditions at the time and position for each simulated trial as it progresses through its trajectory.
I have presented a holistic view using all the data we have in a logical manner. You choose to disagree in the usefulness of the BFO data or the drift data and thereby reduce your so called holistic view by cherry picking only the data you find useful. That you believe there was originally a different plan is entirely irrelevant to the facts that I have presented. In fact @TBill and I have discussed the possibility of a change of plan on this blog. A change of plan does not change the observed facts. You are simply in denial of the observed facts, because you do not like the implication. I agree! I do not like a murder suicide either. The fact that we do not like what we observe, does not make it false.
are you still working on finding the more reasoning behind MH370.
The 37+ items of debris found on a coast with no sign of ID plate is an unreliable source.
There is a reason behind the crash or to the disappearance..
It’s not over yet..
You think pilot has a suicidal mass murder based off his simulator?
Dived right into the ocean until fuel runs out.
It’s not over yet.
@JerryS,
Welcome to the blog!
There have been 39 items of MH370 floating debris handed in to the authorities in Malaysia, Australia and France.
7 items had a part number and 2 items also had the work order number in addition. 5 items had a Boeing or MAS stencil mark. 3 items were conform with the Boeing drawings, 2 items were conform with the Boeing structure manual and 1 item with the Boeing parts catalogue.
2 items had the MAS laminate, 1 item had the MAS livery and 1 item had the MAS seat material.
There is no doubt that 23 items came from MH370 which was a MAS Boeing 777.
8 items were not identifiable and 5 item were not analysed.
https://www.dropbox.com/s/0wurgpitx7grise/Debris%20Reports%20Overview%2030DEC2022%20Material.png?dl=0
There is insufficient evidence to come to a definitive legal conclusion that the perpetrator was Captain Zaharie Shah. All we know is that the plane was diverted from its original flight plan and flown for 7 hours 37 minutes 54 seconds to fuel exhaustion in the Southern Indian Ocean. There is circumstantial evidence that the Captain simulated a flight to fuel exhaustion in the Southern Indian Ocean.
@DennisW
To be clear the plan that Zaharie Shah had may have changed 100 times before the 8th March 2014 for all we know. The final plan that was executed is what we observe in the radar data, satellite data, fuel data, aircraft performance data, weather data encountered en-route, aerial search data, underwater search data, analysis of debris items recovered and drift data from the possible crash locations to the debris find locations.
@Richard
There appears to be little convergence in our views. No sense beating on it any further. I don’t think I am cherry picking any observables, but I won’t debate that point either.
I actually had to think about using “further” versus “farther”. Despite our differences being analogous to a distance, I decided “further” was preferred.
I hope we both live long enough to allow a debris find to settle the matter. 🙂
@DennisW
There is a difference between the American English usage of “further” and “farther” and the English English usage.
In England we use both “farther” and “further” in relation to distance. We use only “further” when we mean “more” or “furthermore” as in “further to my previous statement” or “I do not propose to discuss it any further” or “furthermore you are wrong on the last point”.
In America I am given to understand that “farther” is used of physical distance and “further” is used of figurative distance.
It is a shame that you are no longer willing to discuss our two scenarios any further. I had hoped to take our understanding farther and farther as well as further and further.
@Richard,
Your interpretation of further/farther usage in American English is correct, but in practice it is frequently violated, and few people really care.
The “credible new information” stipulation falls into the “you will know it when you see it category”, and allows Malaysia to be a gatekeeper on search activity without the appearance of being a bottleneck.
@Richard
My feeling is that we are both “anchored” to our views in an Amos Tversky defined sense.
BTW, I had lunch with Amos at Stanford. He had a “light up the room” personality and physical presence. It was then that I realized I am a genetically boring person.
@All
Ocean Infinity’s technology in 2018 was better than Fugro’s in 2015 and 2016. Ocean Infinity’s technology now is better than Ocean Infinity’s technology in 2018.
Can we agree on a search area recommendation as Ocean Infinity are willing to search again.
Malaysia is also willing, if there is credible new information.
What constitutes credible new information?
I was hoping the re-review of the simulator data (above) suggests 32 S in combination with Dr Chari’s drift analysis. The re-review of the simulator data is incomplete, to the extent the complete sim data is still being hidden by Malaysia.
I do not mind if Malaysia is asking (eg; NTSB/FBI) to analyze the quarantined data (all data) to help find MH370. But I think the data is being hidden by Malaysia, and furthermore any secret analysis already completed (eg; some say FBI did) is being trashed.
I do not see how anyone would search for MH370 with data being hidden by Malaysia. I am inclined to agree with those who say the searches are based on other hidden agendas such as sea floor mapping and treasure hunting, or PR for OI.
If so, fine with me, just say so truthfully. But as far as finding MH370 we are “peeing in the wind” because we are not analyzing the data we have and/or can get.
@DennisW
At the risk of being boring …
The Boeing Event Report in Appendix 1.6E of the Malaysian SIR (page 1,294) states that the Maximum Range Cruise (MRC) following the power up of the SATCOM system allows a flight path of 2,806 nm until fuel exhaustion at FL400 and Mach 0.818.
A flight path to Cocos Island is only 1,156 nm and we know that MH370 did not land there.
A flight path to Cocos Island via waypoint BEDAX in order to avoid overflying Indonesia is only 1,224 nm and is nowhere near fuel exhaustion.
A flight path to Christmas Island is only 1,205 nm and we know that MH370 did not land there.
A flight path to Christmas Island via waypoint BEDAX in order to avoid overflying Indonesia is only 1,343 nm and is nowhere near fuel exhaustion.
A flight path to Learmonth, Australia is only 2,059 nm and we know that MH370 did not land there.
A flight path to Learmonth, Australia via waypoint BEDAX in order to avoid overflying Indonesia is only 2,196 nm and is not near fuel exhaustion.
A flight path to Perth, Australia is only 2,606 nm and we know that MH370 did not land there.
A flight path to Perth, Australia via waypoint BEDAX in order to avoid overflying Indonesia is only 2,726 nm and is just doable before fuel exhaustion.
A flight path to Learmonth, Australia via Cocos Island is only 2,313 nm and is nowhere near fuel exhaustion.
A flight path to Learmonth, Australia via waypoint BEDAX and via Cocos Island is only 2,381 nm and is nowhere near fuel exhaustion.
If Plan A was to have a “bailout” option, why do none of these options fit the fact of an end of flight at fuel exhaustion and why were none of these options actually executed.
I conclude there was no “bailout” Plan A.
@Richard
Fuel availability constitutes an upper bound on range. It can always be dumped which would be sensible for an easier safe landing on the Cocos.
@DennisW
So why didn’t MH370 land on Cocos Island?
@Richard
Anyone who believes it is possible to model the effects of a tropical cyclone on surface debris is far from boring.
@Richard
The terms for a landing were not possible to negotiate between Shah’s people on the ground and the officials running Malaysia at the time. A landing would be equivalent to having your bluff called, and would greatly weaken the position of the oppostion in any future negotiations. It was absolutley necessary to carry out the “or else” condition.
Professor Chari Pattiaratchi and I fully support searching wider and more thoroughly between 35° S and 30° S. Personally I think the most likely crash site is at the foot of Broken Ridge at about 32.5° S, where the underwater terrain is very rugged. Prof. Chari always said the most likely crash site is between 32° S and 33°S, so we consider that to be the priority. We also think the area along the 7th arc between 33° S and 35°S searched in the first search, but not by Ocean Infinity, is worth a second look with their improved technology.
@Prof. Charitha Pattiaratchi, @BG370,
My personal view is that MH370 lies between 33°S and 35°S close to the 7th Arc in the area originally searched by Fugro. This area was not revisited in the search by Ocean Infinity.
Putting aside my personal view, I am happy to endorse your proposal to search wider and more thoroughly between 35°S and 30°S. I would propose starting close to the 7th Arc and extending out step by step to ± 65 nm from the 7th Arc.
@Richard
EXCELLENT. We both support your proposal to search that area wide.
@TBill
I agree that there should be full disclosure of the data from Zaharie Shah’s home flight simulator.
Analysts must be allowed access to all the data to be able to better determine where MH370 is to be found.
Prof. Chari and my recommendation and endorsement of the search from 30° S to 35°S, 65 nm on each side of the 7th arc, are based solely on oceanography, debris, and drift analysis. We do not assume or endorse the pilot suicide flight path theory, and do not factor the simulator into our calculations. Personally I do not believe that analysis of the simulator will help identify the crash site, but of course support the release of all data. Malaysia especially should make public the raw military radar data, which would be very valuable in analyzing the flight.
@Prof. Charitha Pattiaratchi, @BG370,
My recommendation and endorsement of the search from 30°S to 35°S, 65 nm either side of the 7th Arc is based on the Inmarsat satellite data, Boeing 777-200ER aircraft navigation and fuel performance, the weather in the SIO during the MH370 flight, drift analysis using the CSIRO BRAN2015 and BRAN2020 SIO ocean model provided by David Griffin, all debris finds reported and confirmed as being definitely from MH370, absence of debris finds in south-west Australia, absence of debris finds during the aerial search and absence of debris finds during the underwater searches.
I consider both the case that there was an active pilot until the end of flight as well as the case there was no active pilot until the end of flight.
I do not assume a pilot murder suicide, but my personal view is that this is the most likely scenario. The Zaharie Shah home flight simulator shows both planning and intent.
I agree that it would be helpful if Malaysia, Thailand, Indonesia, India and Singapore made their raw military radar data available and if Malaysia, Australia and the USA made all the Zaharie Shah home flight simulator data available.
@ Richard
It is very encouraging that we arrive at the same proposed search area in different ways.
SEARCH ON !!
@Richard, BG370. Herewith, to borrow from a Bertrand Russell book title, an Unpopular Essay….
You say, “Ocean Infinity’s technology in 2018 was better than Fugro’s in 2015 and 2016. Ocean Infinity’s technology now is better than Ocean Infinity’s technology in 2018.”
BG370 says that he and Professor Pattiaratchi think that, “the area along the 7th arc between 33° S and 35°S searched in the first search, but not by Ocean Infinity, is worth a second look with their improved technology.”
The probability of success in a previously searched area would have to be a lot higher than that of the previous search, yet I believe that that earlier was estimated at 95%. So there is not much improvement that new technology can bring.
If in fact it was less than that means that that estimate was wrong, in turn suggesting that quality management could not deliver that. However so far as I know that, that has not been raised with those quality managers, including Ocean Infinity’s, for their views. Without those there are no reasonable grounds to suppose that the previous search quality would achieve less, even though the new technology offers greatly increased speed, and even if less that that the amount would make a real difference.
Ocean Infinity initially missed the Argentine submarine you will remember so the technology employed there was fallible, at least in difficult terrain but such is part of the area to be re-searched (UGIB) and also part of unsearched areas if the IGIB area is to be extended.
As to the previously unsearched area, because of the likely glide distance unpiloted, much of that would suppose there was a pilot. I have raised before how the SDU power could be cycled by him causing the final transmissions at the 7th arc, with premature APU fuel failure being consistent with no IFE connection. The pilot could have dived (‘dove’ to some) the aircraft finally while still powered, thus without another log-on.
UGIB has assessed a pilot as unlikely, since fuel that otherwise would have been used producing engine bleed air for the air conditioning packs would need to be saved. That would require a deliberate decision of a pilot to turn that off for some time, which he was unlikely to survive. Why he would do this remains unclear since there is little supporting evidence that he sought maximum range and, unless incapacitation was imminent, it would be reasonable (to me) to expect he would see the aircraft to the end point.
@BG370. Chari Pattiaratchi reportedly recommended searching out to 60NM from the 7th arc but I can uncover no supporting argument.
In answer to a question about that from me he responded that he is an oceanographer, without elucidating. Implicitly then that comes from his modelling but without any detail. that remains an assertion. Likewise while you and he consider between 32˚and 33˚S to be a priority there is no supporting documentation.
To me there has been no demonstration as yet that a new search is warranted, as distinct from sought.
Blaine you and I have different views on the intent factor. So I go where you do not go: seeing sim data as real intent, as well as actual MH370 BTO/BFO data. However, I also feel it *may* point to Broken Ridge crash site as you say, and perhaps even further than 60 nm is conceivable to me. But I think it takes more analysis power to prove or support that, more than I can provide alone. So what I say is “we” (big we) need to study that case, because it makes sense to me as one leading theory. But in my mind that study needs to include active pilot cases.
@TBill
I am not a fan of increasing the search width. The only support for that tactic is the fact that the plane has not been found where the anaytics of our “cognoscenti” suggest it should be found. The EOF BFO suggests a terminus very close to the 7th arc. A dive-glide-dive scenario is fanciful at best, but seems to be gaining in popularity for the same reason as above. There is a lot of plausible area close to the 7th arc which has not been searched. I think it is better (and certainly yields more information) to search those areas before expanding the search width which we categorized long ago as a desparate undertaking.
@TBill
You have alluded to the possibility that the pilot was actively managing the SATCOM logons and that the logon sequence at the 7th Arc possibly came before fuel exhaustion.
“it is possible the Satellite signal at Arc7 came before fuel exhaustion.”
“However, what I favor is the pilot was active and was managing the SATCOMMs logons. The Arc7 re-logon might have been a mistake or intentional.”
I disagree for the following reasons:
1. The logon request at 00:19:29 UTC at the 7th Arc uses the same code as the logon request at 12:50:20 UTC and 18:25:27 UTC, which are all after a SDU power up reboot.
2. If the pilot executed a logon or a logoff/logon sequence, then this would be recorded in the SITA Inmarsat communication log, which was not the case.
3. The timing of the logon request at 00:19:29 UTC aligns to the estimated time of fuel exhaustion and this is the most likely cause of the loss of power to the SDU. The APU coming on line automatically after both engines shut down is the reason for the SDU power up reboot.
Richard- Agreed (I believe) that the mechanism of Arc7 SATCOM reboot is likely Left Bus power management or interruption.
To me, Arc7 may or may not be fuel exhaustion. Of course, I was supportive to go with that assumption and +-25 nm for Search#2 by OI. Now we have searched most of that area. In my view, we have not looked very hard at the sim data and MH370 data from an intentional perspective, because so many people find that repulsive for one reason or the other. In my spare time I try to list the reasons for this refusal-to-consider-intention phenomenon. Maybe that effort is best keep as secret effort, but the effort is probably needed to find MH370. And if we do that effort, we need all data. Although maybe we have enough data, not sure, because the refusal to consider intent blocks some of the analysis that would otherwise happen.
If we look at the search-controlling narrative, it is passive pilot running out of fuel at a random spot near Arc7, that would be a “findable” spot because it is not intentionally ditched in a hard-to-find manner. Also the narrative is a very hard crash, but that would spread debris over a very wide area, and the wreckage would not scoot down a slope into a ravine in one piece like ARA San Juan did.
@All
As the number of comments on this post is growing, the blog has been divided into pages. This reduces the load time for those on a slower internet connection.
Each page contains a maximum of 50 top level comments and the associated replies. The last page of each post is shown first, with the most recent comments. Older comments can be viewed by clicking the arrow at the top and bottom of the page on the left. Newer comments (if any) can be viewed by clicking the arrow at the top and bottom of the page on the right.
The side bar at the top of the page on the right (on a PC or laptop) or at the bottom of the page (on a mobile device) shows the latest posts followed by the latest comments. The most recent 15 comments are shown in reverse date order with the most recent comment at the top of the list. If you hover over the list of posts or comments the title will be highlighted. By clicking on the highlighted post title or comment title in the side bar you will be taken directly to that post or comment.
The menu at the top of the page will filter the posts by category. Clicking on the picture accompanying each post title and short introduction will also take you directly to the post with a full introduction, download and all associated comments.
All posts are open for comments. The sidebar gives the name of the commenter and the name of the post they commented on. If a post is updated, then this will be indicated in the title of a post.
If you are the author of a post or comment and want to make a change after publication, then let me know via email: richard@mh370search.com and I will make the change for you.
https://www.airlineratings.com/news/new-mh370-debris-washed-south-africa/
@BG370
Many thanks for posting this new MH370 debris find.
This one took so long to beach, it makes you wonder whether it has completed more than one circuit of the SIO.
@BG370
@Richard
That piece of wreckage looks to have a strip of adhesive tape of some sort attached to it. That strikes me as odd for a piece of an aircraft.
Any thoughts on what that strip might be?
@Mike, @DennisW,
In 2018, I computed the BTO Bias for MH371 on the ground in Beijing ZBAA at Gate 22 using the POR satellite.
I used satellite data provided by Duncan Steel for the POR satellite and only used data on Channel Unit 24 when MH371 was stationary at the gate.
I only used the SU Type “0x22 – Access Request (R/T-Channel)” on CU 24 for MH371 to ensure a stable and comparative BTO value, so my POR calibration is based on 3 BTO values only.
There was no IOR satellite communication for MH371, whilst stationary at Gate 22 in Beijing ZBAA.
The IOR BTO Bias I used throughout was -495,679.0000 µs from the Kuala Lumpur calibration exercise we had all previously performed.
The POR BTO Bias I used throughout was -501,420.1236 µs from the Beijing ZBAA Gate 22.
I then reconstructed the flight of MH371 and MH370 based on my findings.
I did not re-calibrate the POR BTO Bias at the MH371 arrival Gate C34 in Kuala Lumpur or the MH370 departure Gate C1 in Kuala Lumpur or when the aircraft was moved to Engineering in between.
The POR BTO Bias of -501,420.1236 µs still gave a very small BTO error for CU24 and SU Type “0x22 – Access Request (R/T-Channel)” on the ground in Kuala Lumpur.
The average POR BTO error for 9 data points on the ground in Kuala Lumpur was 7.8 µs, assuming the Gate and Engineering locations I used are all correct.
I took a guess at the EAFC equation for POR BFO based on the equation for IOR BFO and assumed there was no eclipse experienced by the POR satellite.
The Perth Ground Station data was the same for both IOR and POR.
I achieved a relatively good fit between the ACARS data and BTO/BFO data by accounting for the time differences between the time stamp in the ACARS data and the time stamp of the BTO/BFO data from the SITA log.
Steve Kent refers to my early work in his paper that Mike referenced, where I decoded all the SITA log to get all the ACARS data.
I conclude that the BTO bias was not changed significantly by the SDU power up reboot at 18:25:27 UTC, just as it was not changed by the SDU power up reboot at 12:50:20 UTC on the ground in Kuala Lumpur whilst at Engineering.
@All,
I have included the paper by Steve Kent kindly provided by Mike Exner in the Archive section under the theme Flight Path Analysis “1st January 2018 – Guest Paper from Steve Kent – M371 Flight Path Calculation”.
In the Archive section, I hope to build up a library of all the papers on MH370, so if you have a paper to contribute either as the author or a paper that is already in the public domain, please let me know at richard@mh370search.com
@David
I have the highest confidence in Andy Sherrell, the former Quality Assurance Manager for ATSB during the Fugro underwater search and the MH370 Project Manager during the Ocean Infinity underwater search. He has probably more experience of underwater search for MH370, than anyone else on the planet. He is also subject to scrutiny and continues to enjoy the confidence of his customers, principals and peers. He appears to be well able to handle his apparent conflict of interest.
Andy Sherrell is open to the possibility that MH370 was missed, but as @DennisW keeps pointing out to us, it is unlikely that MH370 was missed. I accept your figure of 95% for the previous search coverage. I accept your point that ARA San Juan was initially missed, however please accept my point that ARA San Juan was eventually found.
I am proposing that Ocean Infinity start close to the 7th Arc by checking areas which Fugro initially searched. This is politically incorrect, because one supplier will not want to tread on the toes of another supplier and indeed ATSB did not request Ocean Infinity to search areas that Fugro had already searched and specifically requested the opposite.
If that narrow search fails close to the 7th Arc, then I am proposing that Ocean Infinity widen the search to cover areas that they had not previously searched because ATSB were adamant that there was no active pilot. How do you know there was no active pilot?
Why are you in denial, that Ocean Infinity’s technology is not improving over the years? Do you really believe their multi-million investment is not going to reap a return?
The UGIB paper also considers both the active and passive pilot case, as you well know.
The argument for a wider search up to 65 nm is based on the possibility of an active pilot and the fact that the drift analysis does not exclude a crash location further from the 7th Arc.
@Richard
David is not in denial of the Ocean Infinity technology improvement. Nor am I for that matter. We simply both question the nature of the improvement – improved search speed not improved debris detection probability. I have not seen any evidence that the Ocean Infinity debris detection probability is better than Fugro’s either.
@Richard
A better example of denial is the desire to repeat the search of an area previously searched despite the low probabilty that the debris was missed. Driven by a misplaced confidence in under constrained analytics that have proven to be incapable of predicting a terminal location – flight path analytics and drift analytics.
The San Juan is a poor example to use in relation to MH370. The San Juan debris consisted of a relatively smooth (slightly deffected) crushed hull as opposed to the broad array of diffuse reflectors associated with aircraft debris.
@Richard. Ocean Infinity’s searching technology, as @DennisW has picked up and @TBill has commented on, obviously is very much faster.
If you have evidence as to how much more thorough it is than Fugro’s was, that would help. I do not think that is self evident, so to me it needs confirmation.
While the Fugro details of calibration and their search results coverage are public knowledge and have been monitored by the ATSB, the same cannot be said of OI’s. I do not mean to imply that OI’s technology or methodology are other than excellent. But actual evidence of it being of superior and appreciable thoroughness to 95% likelihood has escaped me.
About your, “How do you know there was no active pilot?” I have not made myself clear. Overall I think the weight of evidence is that there wasn’t one but that hardly rules it out.
UGIB’s priority (as you know well!) for search area supposes there wasn’t, based on the engine’s need for the fuel otherwise used to keep him alive to the 7th arc. At the same time UGIB has a secondary search area in mind in case that perceived need could be less.
Based on that assessment I think the case for a pilot down there and below is weak.
However that argument does not arise for 7th arc sites farther north, where there is not the same need for that extra fuel. There the argument is more whether-or-not a pilot rests more on consistency with the 7th arc descent, IFE non-connection after that and no further transmissions.
A piloted APU-powered 7th arc final-transmissions descent at MEFE on the one hand needs a rationale but at the same time a pilot could explain the descent timing. That would tend to offset the case against there being one. APU fuel starvation in the pull out could halt IFE connection. An ensuing height recovery from the dive could see a glide of beyond 65 NM, even if unlikely, before a final likely plunge.
Alternatively if the 7th arc transmissions were the result of the pilot cycling the left main bus power supply before fuel exhaustion, the left main bus power being removed again a short time later (again needing some rationale), there would be no IFE connection. At subsequent engine failure there would be no SDU power-up since the left tie breaker would be open, the APU thus not being able to power it. Alternatively, if the left tie bus were closed, the APU could have been shut down manually when it auto-started after MEFE, doubtlessly to the pilot’s surprise.
Personally I think that is all more than a bit of a stretch but yet it cannot be ruled out.
In summary I think a pilot doing those things would be unlikely but in gross there could be a long extra distance covered if he did.
Because I think a pilot being present overall is unlikely and because there has been searching within the ATSB (effectively including SSWP and accredited reps) search widths associated with such a non-pilot likelihood, I maintain to now nominate an area of some 130,000 sqkm for search on the basis that that is the most likely place the wreckage is, does not of itself make it likely enough.
@DennisW
You are hopelessly misinformed and out of date.
Leaving aside the marketing bull shit, which does not impress either you, @David or me, there are obvious advances in technology over the last 5 years, both at Ocean Infinity and Fugro and their competitors.
I am not just talking about speed and effectivity of search, AUV battery life duration and the low emission sustainability.
I am more interested in the advance from tethered operation to autonomous operation to multi-day multiple linked autonomous operation. When a swarm of intelligently coupled autonomous devices roam a search area, it is a lot better than a single tethered device that has to be yanked up way in advance of an upcoming underwater cliff face and miss the very target it is looking for in the process.
I am particularly interested in the advances in scale, precision and accuracy on multiple fronts. There are advances in physical sensors, there is higher resolution mapping of the underwater world and there are advances in the software processing with EIVA, iXblue, Esri/Geodata, and CathX.
One thing we learned is that OI is quite fast, so checking limited area(s) on Arc 7 should not be a big time effort. Once we start saying we have to go wider and further away from Arc7, then that starts to say the overall theory of a passive pilot with hard crash on Arc7 is in question, and if that theory is in question, then the question becomes we need a better theory on where on Arc7 may have flown, or we need a huge search area.
@Richard
Sustainability??? In the context of a rare search event.
You just revealed a personality trait I was unaware of.
@DennisW
Stick to the discussion and stop waving your arms!
I am NOT referring to marketing Bull Shit and saying I am NOT primarily interested in Ocean Infinity’s claim their autonomous Armada have a low emission foot print.
What do you have to say about the advances in sensor technology, higher resolution mapping and software processing?
What do you have to say about multi-day multiple linked AUV searches using artificial intelligence?
@Richard
You asked:
“What do you have to say about the advances in sensor technology, higher resolution mapping and software processing?”
The most important aspect of the acoustic search is detection. I am not interested in forming a high resolution image of the debris field. We have cameras for that. What I am interested in is detection. The detection of a large array of diffuse reflectors.
No doubt OI can cover a lot more ground much faster than Fugro. However, you provided no evidence that their ability to detect an aircraft debris field is significantly improved. We are using the same probability of detection today that we used for the AF447 search.
@DennisW
Detection is what the advances in the physical sensor technology, resolution and software are all about.
Are you still convinced that it is a waste of time to search?
@Richard
I never said it was a waste of time to search. Not sure where you got that impression.
You said: “Detection is what the advances in the physical sensor technology, resolution and software are all about.”
Huh? The detection probability for the AF447 search was estimated at 90%. Bringing it to 95% (if you want to pick a number) has very little real world benefit. Doubling and tripling the area searched per unit time is where the action is, and where the improvements in technology provide the most benefit.
@DennisW
You state: “I never said it was a waste of time to search. Not sure where you got that impression.”
A year ago, when we published the UGIB paper, you questioned whether people would take our paper seriously.
I responded: “OI, ATSB, the NOK and the former Malaysian Government have told us that they are taking our latest paper seriously.”
You responded: “I too take it seriously, very seriously. Does that mean that I would make a funding decision involving several million USD based on the paper? That is the question I am asking this group and myself. At this moment I do not have an answer.”
Back then you did not appear to be convinced.
@Richard
I do not support a search where the latest UGIB paper recommends to search, but that is quite different than opposing any search at all. You have a 100% chance of not finding the aircraft if you don’t search.
Just got back from a delightful walk with Ami, and as usual the walk was a good time to reflect. In the rural community where my ranch is located most of the locals are simply high school graduates. No advanced degrees here but ours. Yet the level of comprehension is surprisingly high. Concepts like the “law of diminishing returns” and “regression to the mean” seem to be appreciated and well understood. Although no one heard of the terminology. There seems to be a struggle with those concepts on our forums.
@Richard
Let’s look at the facts. Facts are sometimes hard to digest.
1> Analysts using ISAT data, meteorlogical data, fuel data, aircraft performance data,… have yet to produce a single tangible result.
2> Drift analytics have added nothing to the above. I do not need an advanced degree in oceanography to toss something in the water and see where it goes.
3> Acoustic analysis – no apparent help.
4> WSPR – don’t get me started.
5> Psycho data – no one qualified has really weighed in. Some opinions from practioners, but no heavyweights that I am aware of.
Where are we? The simple truth is nowhere.
@DennisW
1. The UGIB flight path analysis concludes an area centred on 34.23°S 93.79°E with a search width up to a maximum of 140 nm.
2. My drift analysis concludes an area centred on 34.13°S 93.92°E with a search width up to a maximum of 65 nm.
These two findings are independent of one another.
@David, @DennisW, @TBill,
I do not know when you last went shopping for an AUV. Probably at around the last time I went shopping for an AUV, which was never!
One of the problems you will discover if you go shopping is that there are a multitude of suppliers out there willing to sell you an AUV. In fact there is meanwhile a ca. 1 Billion Dollar market just for AUVs, growing at 20% p.a., not to mention ROVs.
As soon as you say, my AUV has to handle ocean depths up to 6,000 m, then the market options reduce. As soon as you say I want the latest technology with long life batteries for 4 day plus deployments, the highest resolution sonar heads to see everything in the dark and multi-spectral synthetic aperture sonar that will pick up a pin head buried in the mud on the sea floor (figuratively speaking), you have to check the balance in your account. If on top you demand proven technology with 10 years of operational data to back it up, then you walk away empty handed.
In 2015 Fugro settled on Edgetech deep tow technology, which was state of the art back then. Fugro also had an AUV and a ROV onboard when required. As the ATSB explain “It was concluded that choosing deep tow vehicles as the primary search method would necessitate having an AUV or ROV readily available for positively identifying sonar contacts.” The ATSB depicts the Fugro equipment in Figure 39 on page 57 of their report “The Operational Search for MH370” dated 3rd October 2017.
https://www.dropbox.com/s/z8qsuxjmui2gwou/Fugro%20Survey%20Edgetech%20deep%20tow%20and%20Kongsberg%20Hugin%201000.png?dl=0
The Kongsberg Maritime Hugin 1000 was introduced in 1993 and was initially rated at a maximum depth of 1,000 m, but later upgraded to a maximum depth of 3,000 m. Since then Kongsberg Maritime have brought out the Hugin 3000, Hugin 4500 and Hugin 6000. The model number is an indication of the depth rating.
Ocean Infinity used a fleet of Hugin 6000s for their MH370 search in 2018. Ocean Infinity did not rely on deep tow technology at all and used the then state of the art Hugin 6000 AUVs. Ocean Infinity also had a ROV on board and like Fugro this was rated to a depth of 6,000 m.
A Hugin 1000 cost $4.5M back in 2007. In 2020, you could buy a Boeing Echo Voyager for $54.8M.
Ocean Infinity have meanwhile bought 15 Hugin 6000s. They have upgraded the whole fleet with the long life batteries from Kraken Robotics at a cost of $9M (just for batteries) and they have upgraded so far 6 out of 15 AUVs with the latest HISAS 1032 Synthetic Aperture Sonar. Ocean Infinity has invested a significant sum of money to maintain a leading position in the underwater search market. Ocean Infinity’s revenue was estimated at $26.7M in 2019, but their order book is much larger (based on contract signings made public) and their investments are multiples of both revenue and order book value.
All this does not mean they are guaranteed to find MH370, but their offer to search again stands on the “no find, no fee” basis just as in 2018.
For MH370 we really need a 7000-meter AUV is one problem. Not saying it is definitely that deep but that’s within our extended search area with glide and fuel, and even if we restrict to Arc7 +-30 we need more than 6000-meters in some places.
@Richard. Yes thanks I do appreciate that the technology has advanced rapidly and that OI is a leading practitioner in that field. Not just that but public spirited, with its earlier offer of no-find, no-fee.
However if Fugro achieved 95% likelihood of a find of this type of wreckage (noting the calibration process) in its search area, with overlapping and other penalties to search speed being necessary for that, then speed and the economies from that seem to me to be what the new technologies offer, at least principally.
To borrow a word from Muhammad Ali, it is hard to whup 95%.
A search by OI now would be very advanced and efficient and by the sound of it, again public spirited. Still, as it stands I do not think that any suggestion that it would search previously searched areas more thoroughly than before, as distinct from adding another ~95% chance to the 5%, is as yet well founded.
However perhaps this is not central anyway to whether to search, where and in what order.
@David
The search of an area previously searched falls in the category of a “diminshed return”. A concept not taught in school these days apparently.
@David
Returning to the drift analytics, I fudged my previous comment. The drift bias to the North is closer to 8 degrees than to 4 degrees. I expected someone to call me on it, but no calls. Using the median latitude of the debris finds, 23.74S, puts the origin latitude 31.74S. I don’t like that very much for many reasons, but it is what it is, and I am a great believer in “regression to the mean”.
Taleb made a fortune in options trading. Not bad for a PhD. He claims (but his expanation is not rigorous by our standards) that the median is a far better metric than the mean, and the average deviation is a better metric than the standard deviation. I would rather be rich than smart. So I am not reluctant to follow his lead.
Gell-Mann (Noble Lautiate in physics) and Peters (generally recognized as the best mathemtician in the UK) recently wrote a paper on expected value theory that blows a century of thought (and a century of economists) out the window. It aligns well with what Taleb has been preaching for years.
@DennisW. Some feedback of detail, not having accessed Taleb.
I take it you picked 8th June 2016 as the closest in that CSIRO report to the last of the beachings. The Malaysian list’s last was 24th May.
For interest, as to sensitivity to date, the below of six months later from BRAN2020, with different origin spread and colouration, would be more to your liking:
http://www.marine.csiro.au/~griffin/MH370/br20_MH370_IOCC_tp3l1p2dp_arc7_4408_15/20161208.html
As to sensitivity to model, the below comparisons with your 8th June BRAN2015, again with different origin spread and colouration, do not seem to differ much, to my eye:
• The latest version of that,
http://www.marine.csiro.au/~griffin/MH370/br15_MH370_IOCC_tp3l1p2dp_arc7_4408_15/20160608.html
• The BRAN2020 version:
http://www.marine.csiro.au/~griffin/MH370/br20_MH370_IOCC_tp3l1p2dp_arc7_4408_15/20160608.html
Would you refer me back to the theory behind this?
@DennisW
I agree the median latitude of the debris finds is 23.74°S.
I agree the drift bias to the North is 7.83° for BRAN 2015, putting the origin latitude at 31.57°S.
The drift bias to the North is 9.86° for BRAN 2020, putting the origin latitude at 33.60°S.
Are you sure MH370 is most likely to be found North of 25°S?
@Richard
I am not sure about any latitude. What I am sure about, however, is Shannon’s math and a preference to maximize the return on the time invested. One can come to the same conclusion using Bayesian considerations as you know.
Your preference is based on drift and Inmarsat analytics which have not changed in the seven years we have been engaged with the MH370 divergence, and which have a questionable reliability IMO. We have searched the 7th arc to 25S with an estimated 90% detection probability. There is no justification for a wider search other than the plane not being found in the width that was already searched. That does not feel good to me.
Speaking of feeling good, I got my second Moderna vaccination this morning. Ami gets her second in a couple of weeks.
@DennisW
I find your approach utilitarian and coin operated, rather than goal oriented.
The flight path analysis has come a long way in the last 7 years with the inclusion of a fuel model based on 9M-MRO engineering data and using a full weather model of the SIO at all flight levels.
The drift analysis has come a long way in the last 7 years with the update from BRAN2015 to BRAN2020, a full surface weather model of the SIO, sea trials with authentic replica debris and tracking all tropical cyclones during the MH370 drift timeframe.
@Richard
Let me try to explain our divergence in a different way.
You sincerely believe you know where the wreckage is most likely to be found. Your motivation to search there is commendable and very aligned with a human desire to find the wreckage.
I have no opinion about where the wreckage is most likely to be found. My motivation is to maximize the information derived from searching – a predictably geeky behavior that has nothing to do with actually finding the wreckage.
@DennisW
We both agree that the previous underwater search had a detection rate of ca. 90%.
The divergence in our approach is that you ignore the remaining 10% based on the law of diminishing returns, whereas I consider the possibility that the aircraft was missed in the remaining 10% based on experience of previous searches.
@all
Well, after rethinking the search priority, and also using some analytics, I am in agreement with Richard.
My best estimate of search prioities is:
1> 35S-25S >25nm from the 7th arc
2> 25S-20S +/-25nm from the 7th arc
3> 35S-25S +/-25nm from the 7th arc
https://docs.google.com/document/d/1lmRXSH6ct4iCwq8z6CUUL0enj–3Ama-lI6laKbNEjA/edit?usp=sharing
Possible, but I think more likely it has been in the region for about five years, washing in and out, buried in sand and unearthed, and floating around.
@BG
Yes, the time of arrival of a debris find is virtually unknown, Despite “expert” Johnny Begue’s claims to the contrary.
@DennisW. Did you go to La Reunion and talk to Johnny Begue and other beach cleaning crews and people around the island ? I did.
You should not demean Johnny by putting expert in quotes, he never claimed to be one. He and others just said the flaperon was washing ashore when he found it, and that it had not been seen earlier. I and reporters in La Reunion checked out rumors of the flaperon having been seen earlier, and found them not to be credible. Please show a little respect for the people who actually found pieces of the plane, like Johnny, me, and Prof. Chari who told me where to go and when. At last count I think we contributed to finding more pieces of the plane than you have.
@BG. I had no intention of demeaning Johnny Begue. Sorry if you took it that way. The notion that you can infer transit time from debris discovery date is simply ridiculous. It can only infer an upper bound on transit time. Your role and level of effort has been remarkable and is appreciated.
However, like the Inmarsat data, the debris finds have not helped, and in my view cannot help, to determine a terminal location. They both have value in inferring the plane went South after the FMT, and that it came down rapidly at EOF.
We are going on seven years here.
@Mick Gilbert
In my view, the new debris find needs to be sent by the South African AAIB to the ATSB for analysis. If and when it is confirmed as a part from a Boeing 777 or MH370, then we need to dig deeper as to how it was found after nearly 7 years.
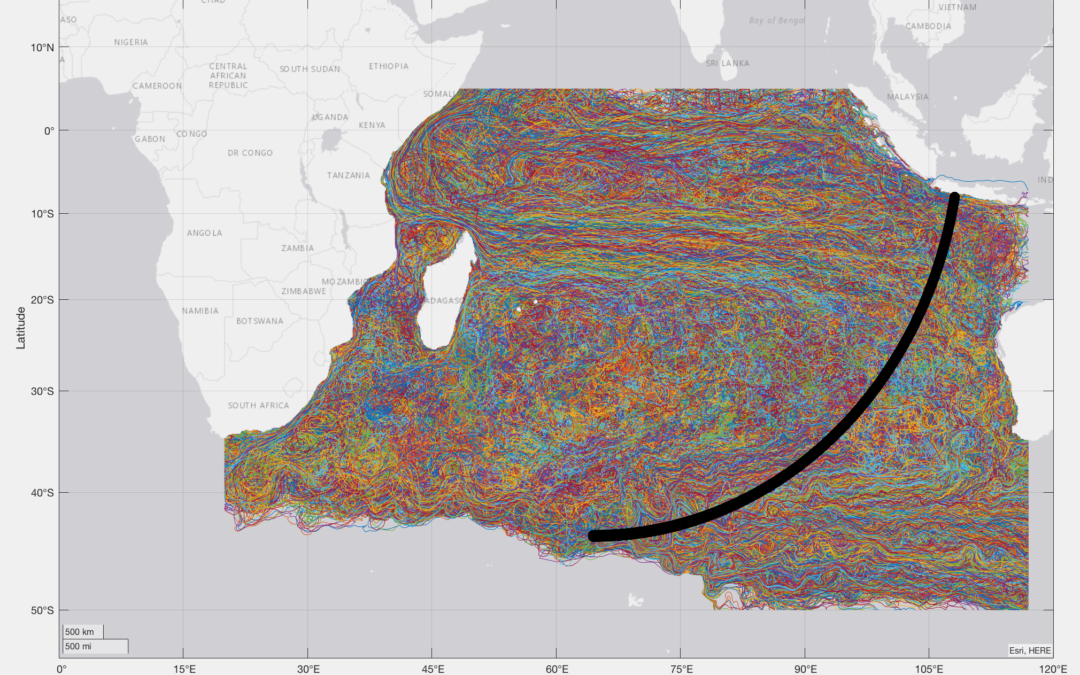
I offered the idea, that if the debris item originated from MH370, that it could have circled the SIO completely and returned to beach in South Africa. This is unlikely as there are very few debris items according to the CSIRO model that complete a full circuit of the SIO.
Another idea is that it beached previously somewhere else and was used as part of some makeshift hut, but later discarded and re-beached in South Africa. That might explain the tape marking that you mention.
There is also some lettering on a metallic background, which I cannot quite make out.
https://www.dropbox.com/s/j44bc2hnx5fu6e4/Debris%20Lettering%20South%20Africa%20February%202021.jpeg?dl=0
@Richard
Thanks Richard. Yes, I agree with you on both counts; 1. the item needs to be properly inspected and 2. an understanding of why it has taken so long to be discovered would be handy.
First pubished in the Economist: Mar 24th, 22:37 2014
What could have happened to MH370?
The tragedy could have been caused by a sudden and violent fire in the cockpit.
On the assumption that it could have been an electrical fire, the pilots would immediately switch off all electrical power in the cockpit.
The pilots would then turn the plane towards the nearest airport. The fire would have been of such intensity that both pilots would have been overcome by the smoke/flames before being able to switch electrical devices back on. They were not able to make a distress call.
The cockpit doors would have been locked shut. The fire would have continued until all flammable material in the cockpit had burnt. The plane would then continue flying on autopilot until it ran out of fuel.
An Egyptair 777, at Cairo on Jul 29th 2011, had a cockpit fire that incinerated the cockpit. For more search: 777 Egypt Air fire. There are pictures of the burnt-out cockpit on the web.
The cause of the fire on the Egyptair plane was: ‘Electrical fault or short circuit resulted in electrical heating of flexible hoses in the flight crew oxygen system.’
Boeing did not issue a mandatory modification. It needs to be ascertained whether the MH370 was subject to this modification and if so had it been made?
@Eddie Bleasdale
If there was a sudden and violent fire in the cockpit, how do you account for the fact that the satellite data shows MH370 continued to fly for a total of 7 hours 37 minutes?
In most flight accidents involving fire, there is a time frame of around 20 minutes to make an emergency landing.
The Main Equipment Centre where the avionics is housed, which provides the auto pilot function you refer to, is directly under the cockpit in the nose of the aircraft. How do you account for the fact that the cockpit crew was overwhelmed and the cockpit equipment out of action, but the auto pilot carried on functioning despite an electrical fire in the cockpit area?
The co-pilot’s mobile was detected over Penang and assuming he was in the cockpit at the time of the fire, how do you account for the fact that the mobile still functioned?
@DennisW
You stated: “The notion that you can infer transit time from debris discovery date is simply ridiculous.”
You have got it completely the wrong way round!
We are inferring transit time from a highly sophisticated ocean model developed and tested over many years using a statistically significant number of 86,400 trials from all possible crash latitudes, the actual windage of the particular debris item from sea trials and the actual weather data for each day in each transit path.
If the particular debris item is then reported full of barnacles by a reliable source whose job it is to clean debris from that particular beach every day and it matches the model result, then we have alignment.
You argue (1) the drift analysis has not helped and (2) MH370 has to have crashed north of 25°S because we have not looked there.
I argue (1) the drift analysis excludes a crash latitude north of 25°S and (2) because we have not looked north of 25°S is irrelevant as to whether MH370 is there or not.
By the way, Johnny Begue probably knows more about floating debris than all of us.
@Richard
It is a model. Just like a climate model (and the Inmarsat model), it was constructed by a group of highly credentialed people. Is it simply bad luck that the last (and claimed to be best) climate model has been wrong for the last 20 years or so? Likewise the Inmarsat model has produced credible terminal locations for any point on the 7th arc.
You have a lot of faith in models. I don’t share it any more than I believe you can model the effect of tropical storms on floating debris or model the behavior of drifting debris around coastlines.
As far as Johnny Begue is concerned I would be inclined to heed has opinion more than Chari Pattiaratchi’s on the behavior of floating debris around Reunion Island.
I don’t care where the next MH370 search is conducted. I don’t have any skin in that game. It is, however, true that searching an area previously searched makes little sense at a previous search detection probability of 90%. It is also true that the EOF BFO strongly supports a very rapid EOF descent. Now you think we should consider a dive-glide-dive EOF scenario (which we once discarded as contrived). I can only shake my head.
@DennisW
I do not believe in computer models.
I believe in tested computer models, that align with reality.
There is an important difference.
There are computer models of trips to Mars, landing on the moon or even an asteroid and an automatic landing the last time you took a plane to a fog bound airport, which all worked.
Then there are computer models as used on the Boeing 737 Max, the Chernobyl nuclear power plant safety system, pedestrian fatalities involving self driving automobiles or losing an AUV under the ice cap of Antartica, which did not work.
You criticise me for not keeping an open mind and then you criticise me for considering a dive-glide-dive EOF scenario. I conclude, I am dead if I do and dead if I don’t. But you are always right, especially when someone disagrees with your current theory. A lot of head shaking for someone who has no skin in the game and doesn’t care where the next search takes place.
@Richard
Classical mechanics can be and are modeled accurately. Climate and oceanic debris drift are in a much different domain. Inmarsat data modeling falls in a category all its own – underconstrained and futile.
Hey, I am not being critical of you or your analytics. I respect both. Just trying to keep things in perspective, and keep our expectations realistic.
@DennisW, @David,
The 7th Arc from 8°S to 40°S is 4,365 km long. The maximum a Boeing 777 could glide with an active pilot is 140 nm, which implies a search width of ± 259 km.
It is not feasible to request that Ocean Infinity search 4,365 x 518 = 2.3 M km2.
Fugro covered 120,000 km2.
OI covered another 120,000 km2.
@DennisW states MH370 was unlikely missed by Fugro or OI and MH370 is unlikely to be far from the 7th Arc, so search 25°S to 8°S at say ± 22 nm, which is 173,652 km2.
@David states Fugro and OI covered 95% and questions the value of searching the remaining 5%.
I am saying search 35°S to 30°S at ±65 nm, which totals 221,000 km2, but start at the 7th Arc and move outwards in both directions, because MH370 was more likely missed by Fugro using towed underwater vehicles, rather than missed by OI using autonomous underwater vehicles.
The first place to look is the previously searched Fugro areas between 30°S and 35°S. The next place to look is the areas outside the Fugro and OI previously searched areas, between ± 22 nm and ± 65 nm. The last place to look is the previously searched OI areas.
re: OI search, I do not believe we have a report saying where they looked and/or did not have time to look. OI spent quite a bit of time at Broken Ridge but according to my notes they may have skipped some of the area +-25nm. Presumably OI ran out of time since that area is so difficult. At the time, I was satisfied to move on, but that is my recollection. I recall Ge Rijn wanted BR ~40 nm off Arc7, but that was not supported.
If we think the crash was violent with many pieces, seems like we could do sampling vs. lawn mowing approach.
@TBill
We have weekly reports from Malaysia covering the area searched by Ocean Infinity.
We also have the track of Seabed Constructor and know where it stopped to launch or collect AUVs.
Ocean Infinity narrowed the search width slightly to ± 22 nm when they went further north towards 25°S.
When I get chance I will send you email of area I think missed according to my notes.
@Richard. Looks like a reasonable sequence Richard should a new search be conducted. Malaysia would consult I would imagine. There is also the hard issue as to what is likely to be gained vs stirring hopes again.
I made it 134,000 sq km. If so, not as much as you think, though more than either search hitherto, though it is really “up to”, depending on whether there was success.
I do not feel stirring hopes is a reason to not progress a search, but the issue is over-optimism on finding the aircraft. I am not too hopeful anymore of finding MH370 unless we commit to a long term effort.
It is a bit of a Catch-22, some optimism is needed to “sell” the plan, but the reality is more complex.
The new debris find is a possible game changer if it allows a better analysis of crash dynamics.
@David
Upon reflection I decided to extend the proposed search area to 35.5°S.
I recalculated the 7th Arc length at 20,000 feet using the following points:
30.0°S 98.23°E
31.0°S 97.32°E
32.0°S 96.34°E
33.0°S 95.28°E
34.0°S 94.14°E
35.0°S 92.89°E
35.5°S 92.22°E
The distances between the points along the 7th Arc are 142 + 145 + 149 + 153 + 160 + 82 = 831 km.
A search width across the 7th Arc is ± 65 nm or 241 km.
The total search area is roughly 831 x 241 ≈ 200,000 km2.
@Richard. Yes, thanks. I erred.
@All
I have included a new guest paper from Niels Tas in the Archive section on Flight Path Analysis dated 17th February 2021 and entitled “Python based implementation of MH370 explicit path generation employing polynomial fits to BTO and BFO derived input data”.
Niels concludes that for the Constant True Track (CTT) navigation mode, the MH370 end point is between 32.5°S and 36.1°S. The best fit flight paths end at 34.2°S on a track of 178.8°T and flight level of FL347.
Niels is currently extending his work to include the CMT, CTH and CMH navigation modes.
@All
The guest paper from Niels Tas in the Archive section has been updated to V2.
@All,
The question has often been asked, whether the Australian Over-The-Horizon radar JORN (Jindalee Over the horizon Radar Network) detected MH370. The IG investigated this question in 2014 and again in 2015, 2016 and 2017. Duncan Steel is a founder member of the IG and worked for many years on JORN and has access to the data, much of which is classified. Duncan is the source of most of my knowledge of JORN, which is confined to information in the public domain and mostly obtained by Freedom Of Information requests. I am also grateful to @David who has updated me on more recent developments with JORN.
Duncan concluded in 2014, that it is a very low likelihood that MH370 was detected (between 1 in 1,000 and 1 in 10,000) for a number of reasons. Although the range of JORN is theoretically unlimited, the capability is practically limited.
The potential coverage goes far further than the sketch on Wikipedia:
https://www.dropbox.com/s/4wr5cvkbmbeuer4/JORN%20Coverage.png?dl=0
Duncan has seen a map of East Africa, that results directly from JORN echoes. With the system tuned in a certain way, and with consistent ground dwell on a pre-determined area, and with near-perfect ionospheric conditions, it could get a return from an aircraft taking off in Singapore. But first you need to know where the airport is, and what sort of doppler shift is to be expected, and a whole heap of other things. This sort of exercise would be carried out in order to test capabilities, but not for surveillance. During the conflict in East Timor in 1999, Australia sent 5,500 troops on a UN peace keeping mission and JORN could detect the Hercules C-130 transport aircraft landing at Dili Airport in East Timor at a distance of 2,203 km from Laverton and 2,619 km from Longreach. The radar was accurate enough to show aircraft turning on their landing approach to Dili Airport.
JORN is used mainly to detect smaller sea vessels, which it picks up through their wakes. There are hundreds of illegal immigrants trying to reach Australia. Drug smugglers also use boat routes. JORN could also pick up a large aircraft, if the operators were searching for it, although in any dwell cell there may well be several such targets. It was not originally designed or operated to detect missiles (large Doppler shifts), although I am aware that the capability has since been upgraded to enable detection of cruise missiles and even stealth bombers.
Theoretically there are no aircraft paths that avoid JORN. But the fact is that JORN most likely did not see MH370. If it was already known where MH370 was, the Australian government would not have launched a very expensive aerial and underwater search to find MH370. Firstly JORN appears to have a cut off at 28°S when looking into the Southern Indian Ocean, so a MH370 flight path south of 28°S might not be followed. Secondly, if MH370 headed for the Australian territories of Cocos Island or Christmas Island then, this is definitely in the area of surveillance for boat migrants and operators are not looking for aircraft at cruise altitudes.
JORN is an OTHR system using bounces (indeed multiple bounces) between the F-region of the ionosphere and the ground/sea to see ‘over-the-horizon’, and one can use range-gating so as to select the ranges at which you are collecting echoes from. The ‘maps’ of the East Coast of Africa made using JORN date from 1986, when JORN was in its infancy. The scientists involved separated out ground-dwell-cells that are stationary (i.e. land) and those that are moving (ocean waves) so as to draw such an image/map.
The JORN range can be extended outwards from the sketch in Wikipedia, simply by using multiple bounces (i.e. larger ranges). When JORN can be operated, and what it can do, is strongly dependent on the time of day (better at night when the E-region has settled down) and also space weather/solar activity. Under optimal conditions the F-region is like a spherical mirror at 250 km altitude, the ground/sea is likewise a spherical mirror for these wavelengths (HF/VHF), and the signals bounce up and down between them both outwards and on return.
Duncan has patterns that extend out further because at one stage, he was working on another project that involved JORN. These patterns are not classified, as such, and the Australian Government would generally like people elsewhere to think that JORN can do more than it really can (i.e. neglecting the various limitations).
In 2016, the ATSB wanted to know if the IG had knowledge of whether Zaharie Shah performed web searches on JORN coverage. The ATSB asked Malaysia but never got a response. We told them that we saw nothing about that in materials in our possession. If Zaharie Shah was wanting to devise a path avoiding any chance of being detected by JORN, we supposed that he would use the patterns as shown on the above Wikipedia page. Of course one can delete one’s browsing history, or use an ‘incognito’ window with most web browsers. If it could be known that ZS did access (say) the JORN Wikipedia page then that would be a strong pointer.
The IG has all the RNZAF images from the MH370 Aerial Search from yet another Freedom Of Information request. This includes images of calibration targets, which include GPS tracking beacons and were dropped from aircraft. An official JORN detection range doesn’t appear to been published by the Australian Defence Force, a number of open sources suggest that the Laverton array’s range is bounded to its south west along a radial that is approximately parallel to 28ºS. If so, it’s possible that a calibration target could be drifting in the northern part of the aerial search area and was spotted by the RNZAF. Alternatively, a HF radar calibration target may have been dropped as a calibration target specifically for the aircraft employed on the MH370 surface search, so as to ensure that something known could be detected during their operations to search for MH370.
The issue with JORN is that (a) It is often not operating; (b) When it is operating there are several distinct modes that it can use, for different applications, and the chance of it having been operated at the relevant time with the needed frequencies, range-gating, and doppler shifts… is small. JORN launches a skywave. That is, the propagation is deliberately upwards: not vertically, but at some desired elevation angle. One would have antennas (which may be simple copper wires, may be half-wavelength coaxial cables linked in line with core-to-shield cross-overs, may be all sorts of other simple shapes like loops of wire) that are on ‘poles’ that place them some fraction of a wavelength above the ground. The ground you make conducting (e.g. a layer of chicken wire covering it, or just a mass of wires stretched along the ground beneath the antennas). Then the interference maxima produce beams pointing at an angle upwards, perpendicular to the length of the antennas (which might be over a km long). By interference maxima I mean the wave emanating from the antenna is one wavelength out of phase (which means it’s in-phase) with the wave that has propagated downwards, been reflected from the conducting ground plane (causing a half-wave phase change) and then propagated upwards in accord with the law of reflection (i.e. incident angle = reflected angle). Thus a simple antenna system like that produces a beam narrow in azimuth (because the antenna is many wavelengths long) but has two lobes (to the two directions perpendicular to the antenna, front and back) that are quite wide in elevation angle range. Now, that is all ‘simple’. The reality of JORN is that they do some sophisticated stuff both in terms of the antenna design (it is frequency-agile) and also the phasing of the sub-sections of the antenna. In essence it’s like a cm-wave phased-array system, but on a grand scale because the wavelength are so much longer (3-30 MHz say, 100 m to 10 m wavelengths).
That all contrasts with a HFSWR (HF surface-wave radar). The intent is to launch a wave that hugs the ground/ocean, and propagates that way. It’s similar to a wave emerging from a block of glass when the critical angle is reached: the beam propagates along the surface. Thus with a HFSWR system like SECAR the antennas are close to the ground, and one wants to limit the wave going ‘upwards’ (i.e. you want no skywave). This can be achieved with various antennas designs, the simplest of which would be a series of linear antennas spaced by one wavelength, so that the beam is launched ‘sideways’ along the ground surface. You don’t want a reflector on the surface, because you want to use the surface as a waveguide along which the HF wave propagates. In essence the wave exists only close to the surface, and follows the Earth’s curvature. Thus it can propagate out over the ocean and weak echoes occur from sea-waves (although the sea is essentially flat on the scale of the radar wavelength), whereas one can get a decent echo from a large target sticking up out of the sea; like a ship. Propagating out to a couple of hundred nautical miles or more is mostly not a problem. What is a problem is things like lightning storms, which occur a lot in the tropics, because they are strong emitters of HF, making the detection of weak radar echoes really problematic. The bottom line is that one would not expect HFSWR systems like SECAR to detect aircraft.
Here is the JASON report which was released in 2009 as a result of a Freedom Of Information request. It explains some of the limitations of the original design of JORN, many of which have been resolved in subsequent expensive upgrades.
https://www.dropbox.com/s/51j5514uxiundna/JASON%20Report%20February%201993%20Release%20May%202009.pdf?dl=0
Here are the JORN sites as .kml files for use in Google Earth to view the the various Tx and Rx sites.
https://www.dropbox.com/s/xc0yaii9yqh79n9/JORN_Longreach_Tx.kml?dl=0
https://www.dropbox.com/s/1k0nnyvvgnyrsy9/JORN_Longreach_Rx.kml?dl=0
https://www.dropbox.com/s/yh73v6c2chqszmk/JORN_Laverton_Tx.kml?dl=0
https://www.dropbox.com/s/ft641x4jxxc3dhw/JORN_Laverton_Rx.kml?dl=0
https://www.dropbox.com/s/k8ru45jjivy9qzg/JORN_NT_Tx.kml?dl=0
https://www.dropbox.com/s/u0xgcaz0zv9ytrq/JORN_NT_Rx.kml?dl=0
The Wikipedia drawing suggests not much JORN coverage below about 25 South? That is in conflict with much of the “MH370 JORN rhetoric” which shows the coverage going much further south.
The Wiki graphic is consistent with a flight to below 25 South per the simulator runs. Also (per Chillit – taboo I know) the shipping lane activity above Batavia and (as Ventus45 observed long ago) the SkyVector L894 that EK425 would be hitting Arc7 at 22 South at about 00:00 are possible reasons that a hypothetical rogue flight plan might have avoided the area north of 25 South.
In other words, I am striving to develop consensus rationale for below 25 South. We still have the question why the flight path was not max distance from OZ (there are so many fans of 38-40 South) but I currently feel MH370 curved inwards towards OZ or at worse was 180S True.
@Tbill
I personally believe the debris find data (and lack of finds in WA) convincingly rules out a 38S and beyond terminus.
@All
I have included a new guest paper from Mike Exner in the Archive section on Flight Path Analysis dated 7th December 2017 and entitled “Complete Set of Arc Definitions including 7th Arc as used by Ocean Infinity”.
This is a complete set (in .kmz format) including the 4 pre IGARI arcs for which we have correlative ADS-B data used for calibration/validation, the 6 closely spaced arcs collectively know as the 1st arc, the other 6 arcs (2-7) plus the final revised 7th arcs based on the MH371 calibration. These are the ones used by Ocean Infinity during their underwater search between 28th January 2018 and 7th June 2018.
(Please note that Dropbox does not allow you to preview .kmz files, but does allow you to download .kmz files, which you can then view in Google Earth.)
Thanks for posting Richard. I should note that all the arcs were calculated using Barry Martin’s brilliant spreadsheet (aqqa V4.4). Several people, starting with Duncan Steel, calculated the I3F1 satellite position vs. time. Victor Iannello (and I) fine tuned the BTO bias estimate using the MH371 Inmarsat log data base. Many others either checked the results or independently verified them. I was informed that Boeing confirmed the updated 7th arc within 70m. If anyone wants more details, email me.
@ALSM
This is not a question about methodology so I will ask it here.
I never used Martin’s spreadsheet. Do you know what altitude he uses for the satellite. The DSTG says the AES uses a satellite altitude 422km higher than the nominal 35788km altitude (see Bayesian methods page 27). Presumably that would only affect BFO, not the BTO values which do not rely on a calculation. The satellite altitude used would affect calculated ring position, however.
Summary: The altitude is precisely calculated as a function of time.
Details: The I3F1 ephemeris (publicly available) is used to compute the 3d (x1,y1,z1) vector position of the satellite in an ECEF coordinate system as a function of time. The Perth GES C-Band antenna coordinates (z2,y2,z2) are fixed and known to a few meters. The user can chose an assumed aircraft altitude (0-50,000 feet) and an estimate for the BTO bias (-495,679 us used). Then, for any given time corresponding to one of the BTO observations (lookup table), the BTO value at that time is used to compute the Longitude for a series of assumed latitudes to produce a lat/lon file (approximately 0.1 degree step size) defining the arc. It took some time to fully understand all that Barry was doing in the spreadsheet (been awhile since I did vector math in my head), but I took the time, and it all makes perfect sense to me. More importantly, several others have independently matched the results using C-code and other models.
@All
Having drawn a blank with JORN and HF over-the horizon Surface Wave Radar, I have turned my attention to WSPR.
In the last week, I have exchanged numerous emails with @RobW. He has spent the last 6 months investigating the possibility of using radio signals from ca. 5,000 WSPR stations out of over 2 million radio amateurs in the world to help find MH370. In particular there is a network equipped to report WSPR (Weak Signal Propagation Reporter) signals, which can be used to help find MH370.
WSPR is a protocol first released in 2008 and developed by Prof. Joe Taylor, who is a Nobel Prize Laureate for Physics and a distinguished Professor of Physics at Princeton University and Alma Mater of Harvard University. The WSPR protocol is a standard message which gives the call sign of the transmitter, the location of the transmitter (using the Maidenhead Grid, see link) and the transmitting power in dBm for radio signals.
https://www.dropbox.com/s/y3phkxp5qvgirqt/Maidenhead%20Grid.png?dl=0
The WSPR network is a global set of transmitting and receiving WSPR radio stations that document any “spots” or detections of certain radio transmissions. The receiving station decodes the WSPR protocol of the transmitting station and enriches the data with its call sign, location, signal-to-noise ratio (SNR) and the drift up to ± 4 Hz/min.
The WSPR database contains all detections between global WSPR radio stations and has meanwhile recorded nearly 3 billion spots since 2008 and is currently growing at the rate of 60 Million spots per month. The database shows all the links between transmitters and receivers every 2 minutes. The database contains the spot id, timestamp, Rx call sign, Rx location, SNR, frequency, TX call sign, Tx location, Tx power, drift, distance, azimuth, band, version and code.
HF radio transmissions work primarily by bouncing radio waves off the ionosphere. There are many factors that affect the path of HF radio waves and the ability of the ionosphere to propagate, including improvement at night time, sunspot cycle, meteor scattering, auroral back scattering and sporadic E-propagation. The ionosphere is defined as the layer of the earth’s atmosphere that is ionised by solar and cosmic radiation. It is also possible to bounce radio waves from the surface of the moon (VHF/UHF and higher frequencies), from the ionised trails of meteors entering the earth’s atmosphere, from sea waves, from larger spacecraft such as the ISS and from aircraft.
WSPR is a very bad aircraft surveillance system, but it was designed for propagation tests. The Inmarsat satellite data unit BTO and BFO is a very bad aircraft surveillance system, but it was designed for communication. The combination of BTO/BFO and WSPR can be a very powerful aircraft detection system, but still with limited identification and localisation capability.
@RobW has used the WSPR data in combination with ADS-B data to successfully track a number of aircraft including AF447, MH17 and German Wings 9525 and many aircraft in remote regions such as the Antarctica. In the case of MH370, the ADS-B data was switched off. We are now proposing using the BTO/BFO data in combination with the WSPR data. Just as the BTO data is determined by the distance between the aircraft and the satellite, the SNR of the received WSPR signal is affected by the propagation distance, scatter, absorption, reflection and diffraction. Just as the BFO data is determined by the ground speed, track and rate of climb/descent, the same Doppler shift will affect the drift of WSPR signals. The WSPR database only includes reports with a drift of ≤ ± 4 Hz/min. Doppler shifts causing drift can be observed, when an aircraft is flying a holding pattern, directly passing over your location or nearby or changing heading. If the aircraft is in close proximity and the Doppler variation is too high the decoder in the receiver will not be able to decode the signal and drifts in excess of ± 4 Hz/min being not decoded (non decodes with frequency and SNR) are not in the database.
An aircraft will produce forward scatter (FS), side scatter (SS) and back scatter (BS) of radio signals. It is possible, if you know where an aircraft is located and the time of the detection, to find the related phenomena in the WSPR database. When you do not know where and when an aircraft is to be found, the proposal is to detect the phenomena and interpret the data to give an approximate location and time frame. We are looking for anomalies in the received SNR and drift, which is analogous to looking for changes in the BTO and BFO. We are looking for FS, SS and BS from the same transmitter at the same time, but picked up by different receivers. If FS is picked up on one TxRx link and SS on another TxRx link, at the same time and from the same transmitter, this can give an indication of the approximate location of the aircraft.
The advantage of searching for MH370 using WSPR data is that there was a solar peak in April 2014. Since this is an 11 year cycle, that is just about as good as it gets in terms of HF radio wave propagation. Another advantage is that MH370 flew during weekend night with less air traffic, but at the end of flight experienced the dawn. The grey line is also important for radio wave propagation in the 14 MHz band, commonly found in the WSPR database. Grey line (or gray line in the US) propagation is a form of radio signal propagation that provides surprisingly long distance radio communications at dawn and dusk, sometimes when other forms of ionospheric propagation may not be expected to provide signal paths of these distances.
There are 91,895 WSPR links recorded during the flight of MH370 from 7th March 2014 16:42 UTC until 8th March 2014 00:22 UTC, assuming a short glide. I have extended the timeframe to 8th March 2014 01:00 UTC in order to look for any evidence of a long glide. The presence or absence of similar links on previous days in the same location and at the same times are also recorded. The location of other aircraft in the proximity of MH370 is recorded in ADS-B data and can be estimated from flight plans, actual departure and arrival times. The CAPTIO video is particularly useful in deciphering other aircraft in the vicinity of MH370 in the earlier part of the flight.
Initial studies have been performed of the MH370 diversion near waypoint IGARI, the final major turn south in the Malacca Strait near the Andaman Islands and the end of flight in the Southern Indian Ocean (SIO). The end of flight data has the advantage that of course there are fewer aircraft in the vicinity of MH370 and the data will be less ambiguous as to identity. There is a lot of data to analyse. The results will be published as soon as possible. An invitation is extended to analysts who wish to collaborate in the data analysis to join the team.
If anything new can be learned, such as FMT location, that would help.
I would say at least out to 0100. But I am not sure if @EdA (commenting on VI) was correct about altitude of aircraft effect on WSPR detection.
One potential problem with all of the analysis to date (debris drift, acoustic sound, etc) is the assumption flight ended on Arc7 at 00:19.
@Richard
Irrelevant but I think amusing. In both cases we were located quickly, and when the cutter pulled along side an officer and sailers with well creased pants and shiny shoes were on the rail of the cutter. The officer formally requested permission to come aboard even though the sailers were all equiped with scary black rifles. Permission was granted and the main check was for fuel. The Coast levies big fines for being summoned to rescue someone who has simply run out of gas. In any case, very professional and impressive.
@Richard,
I can believe the detection aspect. I don’t see how aircraft location and track can be derived. Tx azimuth is probably derived from Tx and Rx station location not from any properties of the signal itself. How can the bearing to a reflector be determined except by special antennas or antenna arrays.
I’ve been rescued by the Coast Guard a couple of times (not my vessel in either case). The rescue cutter simply requests that you “key” the mic rather than communicating GPS or Loran information. They don’t seem to be trusting souls. In any case they have fairly elaborate direction finding equipment for that purpose.
@DennisW
I stated “WSPR is a very bad aircraft surveillance system”. This is simply because it was not designed for this purpose. In a similar way, the Inmarsat BTO/BFO data is a very bad aircraft surveillance system, simply because it was designed for satellite communications.
I will produce a worked example to show how detection works and how localisation can work to within a certain area and timeframe.
Identification can follow from detection at known locations, where there is other information available (such as ADS-B data) and tracking subsequent consistent detections, when there is no other information available. In an empty airspace it is easier to track an aircraft, in this way. In a crowded airspace, it is much more difficult, because you have to exclude all the other aircraft in close proximity.
This is not the same as the Coast Guard homing in on your radio signals transmitted by keying the microphone.
@Richard
OK. Good luck with that :-).
Yes, I know it is not the same as the Coast Guard system which is why I have little confidence it will work for localization.
@DennisW
I am not claiming that WSPR data can perform exact localisation and tell you the FMT took place at 18:35:27 UTC when MH370 was at 7.5046°N 95.0195°E.
According to the Malaysian military radar at 18:22:12 UTC, MH370 was located at 6.5784°N 96.3407°E. This aligns with the Ist Arc set between 18:25:27 UTC and 18:28:15 UTC. The next we know is MH370 is somewhere on the 2nd Arc at 19:41:03 UTC. This is a large gap in our knowledge of the MH370 flight path.
What I am claiming is that the WSPR data may be able to distinguish between an early FMT just after 18:28:15 UTC and a late FMT just in time to be heading southwards at 19:41:03 UTC.
The Inmarsat satellite BTO and BFO data is only every hour from then on.
The WSPR data is every 2 minutes.
The Inmarsat satellite BTO data gives you the exact distance from the satellite and the BFO data gives you the exact Doppler from which you can extrapolate a Ground Speed, Track, Rate of Climb/Descent combination.
The WSPR data gives you a Tx Power and a Rx SNR and a drift in the range ± 4 Hz/minute.
Between the two sets of data you might be able to detect whether the FMT was early, middle or late. This in turn changes how a MH370 flight path can match the other Arcs up until 00:19:29 UTC.
@Richard,
Said another way, I don’t think WSPR is worth jack shit. I await your example. It should be good for at least a laugh.
Sorry to be crude, but you really stepped into a pile of sh… with this one.
@Richard
I don’t see how the Tx power can be determined when the signal is a reflection. The Tx power can only be known at the actual transmitter.
Furthermore, drift and Doppler are due to quite different physics.
Worth a look see, but I don’t see you can possibly gain any information from WSPR.
@DennisW
My apologies, I have obviously not explained clearly how WSPR works.
The receiver does not determine the Tx power.
The transmitter sends a message using the WSPR protocol which is decoded by the receiver. The message includes the call sign, location and Tx Power. The message is 50 bits in length and comprises 28 bits for the call sign, 15 bits for the locator and 7 bits for the power level. For example “K1ABC FN20 37” is a signal from station K1ABC in Maidenhead grid cell “FN20”, sending at 37 dBm or 10 to the power of 3.7 milliwatts, or about 5.0 Watts.
The receiver can decode this message from the transmitter and can add to it its own call sign and locator as well as the signal to noise ratio and the drift. This is what is recorded in the WSPR database of detections or TxRx links called “spots”.
As I previously explained:
“The WSPR protocol is a standard message which gives the call sign of the transmitter, the location of the transmitter (using the Maidenhead Grid, see link) and the transmitting power in dBm for radio signals.”
“The receiving station decodes the WSPR protocol of the transmitting station and enriches the data with its call sign, location, signal-to-noise ratio (SNR) and the drift up to ± 4 Hz/min.”
As it impossible to squeeze this extended information lossless into 50 bits, the message is sent in 2 transmissions, including a hash code. The code contains 324 symbols. These are fused in 162 groups of each 2 consecutive symbols. The baud rate is only 1.4648 symbols per second and the whole message takes 162 / 1.4648 = 110.6 seconds to send. The bandwidth of the signal is about 6 Hz (4 x 1.4648). WSPR messages can be decoded correctly at SNR levels down to -29 dB at 2.5 kHz bandwidth.
I appreciate that Doppler shift and drift are two different things. I was using an analogy. What I stated was “We are looking for anomalies in the received SNR and drift, which is analogous to looking for changes in the BTO and BFO.”
In summary the idea of using BTO/BFO in combination with WSPR is not a pile of shit as you claim, but is taking a useful idea from a Physics Professor and Nobel Prize Laureate called Joe Taylor just one step further and may give clues that help the search for MH370.
@Richard
I thought your explanation was very clear.
Yes, as I said the received power is an unknown function of the reflection coeficient, and has absolutely nothing to do with range to the reflector. Likewise the path is not determinable because of the crude Tx/Rx timing measurement. WSPR is all about detection. That is it. There is no information in the received signal related to to the location of a possible reflector.
@DennisW
The Tx and Rx are both synchronised to a timing standard. Most convenient is the use of a dedicated time synchronisation application such as Dimension 4, Meinberg NTP or NetTime. The data is recorded every 2 minutes. The precision only has to be better than 1 second.
There is a lot of localisation information available in the WSPR links:
(1) The presence or absence of a WSPR link between particular Tx and Rx combinations.
(2) The presence of forward or back scatter along the line of transmission between Tx and Rx stations.
(3) The presence of side scatter between the Tx station and other Rx stations at the same time as the forward or back scatter but orthogonal to the line of transmission between the Tx and Rx stations indicating forward or back scatter.
(4) Anomalies in the SNR of particular Tx and Rx links at particular times.
(5) Anomalies in the Drift of particular Tx and Rx links at particular times.
(6) Anomalies across particular Tx and Rx links at particular times.
Imagine you have to cross a large room and I have set up hundreds of trip wires or laser beams between Tx and Rx all across the room at different points and different angles, creating a mesh that you could not see and could not avoid. I could work out exactly which steps you took and the path that you followed to get from one side of the room to the other.
@DennisW
… and quite frankly, I do not give a shit, whether it was your left foot or your right arm that tripped the wire or whether the laser beam bounced off the opposite wall or several walls …
Even if you bring along a bunch of your mates to cross the room at the same time, they are all wearing GPS trackers, even if you were clever enough not to have a GPS tracker, I can still work out where you are and every step you take, every move you make …
Big brother is watching you!
@Richard
I sincerely wish you the best.
@All
Here is a worked example combining the BTO/BFO satellite data with WSPR.
In this example, I am investigating the timing of the Final Major Turn (FMT) southwards to the Southern Indian Ocean (SIO).
According to the satellite data, the FMT took place after 18:28:15 UTC and before 19:41:03 UTC.
1. I examined all the WSPR 15,518 links in this timeframe.
2. I consider the Maidenhead grid and look for relevant links.
https://www.dropbox.com/s/y3phkxp5qvgirqt/Maidenhead%20Grid.png?dl=0
3. I note a lot of activity at 19:00 UTC and decide to look at this point in time.
https://www.dropbox.com/s/2nbb7g1q7rq3vtl/WSPR%20Cells%2007032014%20FMT%201900.xlsx?dl=0
4. I note a lot of activity with DH5RAE as Tx and VK7DIK as forward scatter and ZR6AIC as Rx side scatter.
https://www.dropbox.com/s/byihwz0wy6aiv39/WSPR%20Cells%202014-03-07%20DH5RAE%20VK7DIK%20ZR6AIC.png?dl=0
5. I check whether there were any links the day before or week before at around 19:00 UTC and discover there were no WSPR detections in the same timeframe on previous days, so I am not picking up a regular scheduled flight but an exception to the pattern.
https://www.dropbox.com/s/hixiw1q3i0w60td/WSPR%20Cells%202014-03-06%20DH5RAE%20VK7DIK%20ZR6AIC.png?dl=0
https://www.dropbox.com/s/62dt56qc1p7xxk7/WSPR%20Cells%202014-03-01%20DH5RAE%20VK7DIK%20ZR6AIC.png?dl=0
https://www.dropbox.com/s/3a0t5x8icht9nd7/WSPR%20Cells%202014-02-28%20DH5RAE%20VK7DIK%20ZR6AIC.xlsx?dl=0
6. I chart the links on a world map.
https://www.dropbox.com/s/6k0kyet36936gtp/WSPR%20Cells%202014-03-07%201900%20DH5RAE%20VK7DIK%20ZR6AIC%20Worldmap.png?dl=0
7. I zoom into the area of interest and compare to the MH370 flight path from the satellite data.
https://www.dropbox.com/s/jldy8ou7be9idqq/WSPR%20Cells%202014-03-07%201900%20DH5RAE%20VK7DIK%20ZR6AIC%20Zoom.png?dl=0
8. I note that the location at 19:00 UTC is on the same lateral offset to flight route N571 as followed by MH370 but further out over the Andaman Islands between waypoints LAGOG and BIKEN.
https://www.dropbox.com/s/1um68dz3j0fxhbr/SkyVector%20WSPR%202014-03-07%201900%20DH5RAE%20VK7DIK%20ZR6AIC.png?dl=0
9. I conclude this detection could not have been MH370 as the ground speed required to reach this position by 19:00 UTC is too high. I note in passing that this location fits the analysis of the Zaharie Shah home flight simulator by Bill Tracy (please see separate post on this web site).
Richard- Don’t forget UAE343 was close to MH370, and would have progressed normally along flight path N571. Even though the sim data goes out to 10N, I am not suggesting the real flight went that far out. It looks like MH370 FMT was sooner, perhaps due to knowledge of Sabang radar being offline, or other reason, such as less fuel.
@TBill
Flight EK343 was 143 nm (17 minutes flying time at 500 knots) away from the WSPR location at 19:00 UTC and not flying a lateral offset, so it also would appear not to fit.
Here is a link to the position of EK343 at 19:00 UTC according to the CAPTIO video showing other traffic on flight route N571 at the time MH370 was in the vicinity:
https://www.dropbox.com/s/uj0ivlbiv67k9ti/Captio%20MH370%20and%20EK343%20at%201900%20UTC.pdf?dl=0
@Richard. That is a great help thanks in understanding how it works and what is involved and on offer; including the amount of work if all ‘manual’.
So as I understand it potentially it offers a track/time probability enhancement.
But while a positive ‘spot’ has meaning, lack of it (due to conditions for example, or even altitude) doesn’t mean it wasn’t there.
@David,
@RobW reported yesterday that he detected two Airbus H125 helicopters at the Australian Davis Station way East of DP0GVN.
There were receptions from DP0GVN in Antarctica TX in New Zealand by ZL2005SWL as RX, a distance of more than 7,500 km. There had not been any receptions for the last 10 days, due to lower solar flux index (SFI) and geomagnetic storms. Quite probably also because there were no targets. But now conditions were better.
So the conditions make a big difference, but MH370 flew in very good conditions.
If helicopters can be detected, then altitude would appear not to be an issue.
WSPR may be better than I originally thought.
@Richard. Altitude, comments on conditions, thanks.
‘…. better than I originally thought.” Would you expand? The triangulation?
@David
Using the analogy of trip wires, there were at least 91,895 WSPR links during the flight of MH370 (more if there was a long glide).
My original expectation was that MH370 must have hit a few trip wires at some point in the flight, especially as it is a large object at a cruise altitude and the propagation conditions were excellent in March 2014. We know from the fuel endurance until ca. 00:17:30 UTC, that MH370 spent most of the flight at a fuel efficient altitude. However, if there was descent during the FMT, then would we be able to detect it with WSPR?
The flight of two Airbus H125 helicopters near Davis Station in the Antartica on 27th February 2021 between 07:45 UTC and 09:07 UTC detected by WSPR link between Tx DP0GVN and Rx ZL2005SWL at 08:24 UTC changes my view. The Airbus H125 helicopter is small compared to a B777 and according to FlightRadar24 was only at an altitude of 2,150 feet. Although the propagation conditions were good, I was surprised that a small target at low altitude can still be detected.
Here is the relevant data:
(1) Flight Path.
https://www.dropbox.com/s/0cm3dd83sfxvo1v/FlightRadar24%20VH-UUH%20H125%20Davis%20Station%2027FEB2021%200824.png?dl=0
(2) WSPR links showing SNR anomaly at 08:24 UTC.
https://www.dropbox.com/s/oxnhjxrwv96da09/WSPR%20Cells%2027FEB2021%200744-0908%20Tx%20DP0GVN%20Rx%20ZL2005SWL.png?dl=0
(3) WSPR links history showing anomaly is unique.
https://www.dropbox.com/s/pi8zn5iav8k1twa/WSPR%20Cells%2027FEB2021%200744-0908%20Tx%20DP0GVN%20Rx%20ZL2005SWL%20History.png?dl=0
(4) WSPR link shown on the world map (using a Cassini projection).
https://www.dropbox.com/s/bfzffapic2oti68/WSPR%20Cells%2027FEB2021%200744-0908%20Tx%20DP0GVN%20Rx%20ZL2005SWL%20Cassini%20Projection.png?dl=0
@David
I have updated the WSPR link between Tx DP0GVN and Rx ZL2005SWL on 27th February 2021 at 08:24 UTC to show the location of the Davis Station. The Cassini projection shows the great circle route over the geographic south pole, which of course is the shortest route between TX and Rx.
https://www.dropbox.com/s/bfzffapic2oti68/WSPR%20Cells%2027FEB2021%200744-0908%20Tx%20DP0GVN%20Rx%20ZL2005SWL%20Cassini%20Projection.png?dl=0
The mercator projection shows the Davis Station equidistant between the outbound path from the Tx station DP0GVN and the inbound path to the Rx station ZL2005SWL.
https://www.dropbox.com/s/tlgtldhyq6ogcio/WSPR%20Cells%2027FEB2021%200744-0908%20Tx%20DP0GVN%20Rx%20ZL2005SWL%20Mercator%20Projection.png?dl=0
@Richard. You note the detection of an SNR anomaly, its drop I take it rather than the scatter, that indicating interference. Thence knowing from ADS-B that there was a helicopter operating at Davis, the coincident timing of that and lack of other candidates, you deduced that side scatter from that was the likely cause of the interference. Is that about right?
Related, in your earlier example you were able to place the source of interference in the line of the transmission, though in retrospect I do not know how you concluded that.
Also, you drew an orthogonal from what looks to be half way along a different line of transmission, to the first, providing SS triangulation.
In the Davis case that is SS also but you make the point that Davis is equidistant between an outbound transmission line and the inbound to the NZ receiver.
I regret I miss the significance of that as I now miss how, presumably related, your example’s orthogonal was generated.
Maybe I need to read up on Taylor but should you have ready explanations or I have missed something I would you appreciate your alerting me.
Incidentally I make the Davis to northern end of NZ south island distance 6,000 km
Other questions too please. Above you said, “…there were at least 91,895 WSPR links during the flight of MH370 (more if there was a long glide).”
Do you mean that number traversed the MH370 line of flight? Low density down south, but FMT first then LEP? You will use the UGIB route for the travel-south reference?
Will take a lot of time?
First line disambiguation; “….,its drop I take it rather than the scatter,…..” That phrase should be in parentheses.
@Richard
I‘m working on the Two Way Particle-Tracking Model using 32 debris from your report and analyzing the leeway coefficient’s influence on possible crash positions. Using a similar setting like in your report (leeway 1.2%), the found crash positions lie more northwards than your favored position (34.13°S 93.92°E). I saw in your forum that DennisW, BG370 and Professor Chari Pattiaratchi (32°S an 33°S) also favorited a search area more northwards. There lot of possible reasons for the differences in my and the CSIRO simulations (used ocean models, solver, interpolation, …). Maybe one reason lies in the used data set distribution (figure 4 on page 8 in your report). I analyzed the distribution of the start positions along the 7 arc. The positions are nearly uniformly distributed. The distance between neighboring circles (large circles) is approx. 14.0 km and is constant. The histograms of all samples (figure 4 in your report) and all circles are nearly the same (see Figure Circles_along_the_7thArc.pdf).
A little thought experiment: Assume we start in the center position of each circle a path simulation and all particles arrived at a debris location (see Figure 17 in your report). The results should be that there is no favorite crash position. But the result looks like in figure 4 in your report,a crash position more southwards is favorited.
The used data sets work if the 7 arc is split in several parts with a constant length. The number of trials that lie in such a part is the indicator for a crash position. By using the latitude information direct as crash position indicator, the data sets have to be modified (thinning out with increasing latitude). I expand the splitDataset.m function with a thinning-out procedure (method=uniformly). The first data set includes the result of the thinning. You can find the function and few figures in the folder:
https://www.dropbox.com/sh/4na6nc261bhlfee/AADfnZJj3xCYgKPgO483r5YCa?dl=0
Let me know if I make a mistake.
@David
Many thanks for your comment and your excellent questions.
I will take a step back and try and explain, what we are hoping to achieve in combining WSPR with the satellite data.
@RobW is doing fundamental research into aircraft detection using WSPR. He has a doctorate in Electrical Engineering and is a highly experienced amateur radio operator. He is presenting his ideas at international radio amateur and scientific conferences. @RobW has had success in detecting a large number of aircraft. He initially concentrated on flights to the Antartica, simply because the airspace is not crowded and it is easier to align ADS-B data with WSPR detections. For example, he has tracked flight QFA2900 from Sydney to the Antartica and back to Sydney. @RobW then turned to tracking flights such as flight SIA479 from JNB (Johannesburg) to SIN (Singapore) over the Indian Ocean or flight SIA214 from PER (Perth) to SIN (Singapore) or flight UAE9242 from DXB (Dubai) to SYD (Sydney). @RobW understandably feels insulted by people who comment: “No one with brain has any belief that WSPR will yield anything useful” or “I don’t think WSPR is worth jack shit.” @RobW is still working through the observation, validation and verification process. He is not claiming a formal and rigorous mathematical proof. He is claiming a number of empirical observations, which he is in the process of verifying and understanding.
I am trying to use the results of @RobW’s fundamental research and combine his WSPR results with the satellite data to see what we can find out to help the search for MH370. I am currently developing a structured approach to WSPR and MH370. I have broken down the MH370 time frame into one hour slots starting at 19:20, 20:20, 21:20, 22:20 and 23:20. In each one hour slot, I consider all WSPR TxRx links that cross the MH370 flight path on all azimuths. I apply a simple algorithm to detect anomalies in the Rx SNR. I then double check the anomaly candidates against all other identical links in the same timeframe and in the previous history. This process results in a manageable number of candidates that are then checked in VOACAP and documented using Matlab. This is a huge amount of data crunching and the process is not fully automated end to end.
Now to your specific questions.
You ask: “You note the detection of an SNR anomaly, its drop I take it rather than the scatter, that indicating interference. Thence knowing from ADS-B that there was a helicopter operating at Davis, the coincident timing of that and lack of other candidates, you deduced that side scatter from that was the likely cause of the interference. Is that about right?”. The short answer is yes.
The long answer is that in the case of the H125 helicopters, we think we had no direct link over the pole to DP0GVN (we still have to check SuperDARN data over the pole for flares etc.). The WSPR signal from DP0GVN in Antarctica, assuming an isotropic radiation in all directions, hit the helicopters at Davis and was scattered amongst other directions to ZL2005SWL (-13 dB) in New Zealand. The signal from DP0GVN also went and to a large number of other stations on 27th February 2021 at 08:08 UTC, 08:24 UTC and 08:38 UTC. For example, the WSPR was received at two stations on Maui, Hawaii AI6VN/KH6 (-23 dB) and KH6KR (-11 dB) at 08:24h UTC. Other spots recorded in California K6KR (-11 dB), KFS (-11 dB very strong) and many other directions (mainly USA, 1 Brazil, 1 Oceania). Here is a list of all the WSPR spots:
https://www.dropbox.com/s/6now4aixv6ed5at/WSPR%20Spots%20DP0GVN%2027FEB2021.png?dl=0
You also asked: “in your earlier example you were able to place the source of interference in the line of the transmission, though in retrospect I do not know how you concluded that.” I do not believe that forward, side and back scatter can be used for a precise triangulation, but perhaps to determine a general area of interest. I do not know how best to graphically present isotropic transmissions, multiple receptions and possible scatter from an aircraft. When multiple receiving stations show an anomaly in the Rx SNR at the same point in time, then it may be because of scatter from an aircraft (amongst other possibilities). You can reduce the number of other possibilities by looking at the history and the propagation conditions. When you detect a WSPR anomaly at multiple receiving stations at the same time from an aircraft with a known position from ADS-B data, then you may be able to continue to track that aircraft when the ADS-B data ceases. Similarly if we can detect WSPR anomalies from MH370 early in the flight at known ADS-B locations, we may be able to continue to track MH370 later in the flight. We can then double check any candidate WSPR detection areas against the satellite data.
You also ask: “there were at least 91,895 WSPR links during the flight of MH370 (more if there was a long glide). Do you mean that number traversed the MH370 line of flight?” No, the figure I gave is the number of WSPR links globally. I am still in the process of working out how many of these WSPR links traversed the possible lines of flight of MH370. I am not assuming the UGIB line of flight. Various analysts agree that MH370 started with a flight path into the SIO somewhere between waypoints NILAM, IGOGU, MEMAK, POVUS or BEDAX. I am considering various flight paths such as CAPTIO (MEMAK toward Christmas Island), Paul Smithson (6.7974°N 95.2364°E on initial bearing 190.735°T), UGIB (BEDAX LNAV180°T), … At the moment by best guess is over 100 WSPR links traversing a possible MH370 line of flight in each one hour time slot. Surprisingly, there are not that much fewer WSPR links further south in the SIO. Yes, the data crunching is time consuming.
@Richard. Thank you for your answers, summary of the situation and description of your and @RobW’s approaches and methods.
Your orthogonal of the example and its intercept with the line of the second transmission’s Tx and Rx, apparently mid way between these, together with the equidistance from Davis of the two transmission lines that you illustrated, doubtless are beyond my extremely distant recall of such as mixing of out-of-phase and frequencies, so I leave those be.
@Mike Eichhorn
I am looking forward to your new results.
I have downloaded your Matlab script and will try it out.
At 8°S the 7th Arc is running almost North-South (at a bearing around 16°T).
At 45°S the 7th Arc is running almost East-West.
One degree of latitude for a given search width orthogonal to the 7th Arc will result in an ever increasing area from 8°S to 45°S. David Griffin wanted to ensure the number of trials remained constant for a given area. The increasing number of trials per latitude bin is to ensure a normalisation of results at each crash latitude, as shown in Figure 4 on page 8 of my paper. You conclude “The positions are nearly uniformly distributed.”
I accept the point you make and how exactly are we defining the term “crash latitude”.
I will run your new script and investigate any bias, that may have been inadvertently introduced in the results.
Meanwhile I have already stated my support for a search over a wider area as proposed by Prof. Pattiaratchi, Blaine Gibson and @DennisW from 30°S to 35.5°S and at a search width up to 65 nm either side of the 7th Arc.
I am willing to only search +65 miles from Arc7, and skip the -65 miles inside Arc7 poss.
@TBill
How do you conclude that MH370 did not spiral back across inside the 7th Arc?
Richard- I am saying the sim data suggests active pilot glide at the end of flight…and I do not think he is heading for the shallower waters inside of Arc7.
DennisW was a big believer that we have not considered motive and intent. Unfort I could never get Dennis’s support because Dennis felt the motive must have been extortion plan (Xmas Island diversion). Dennis rejected suicide possibility, but was OK with negotiation ultimatum to crash plane.
@David
Aircraft scatter of HF radio transmissions has been known since the 1930’s.
Here is an example of aircraft scatter. The range and possible contact lengths are affected by the size of the plane, flight level and the approximate crossing time of the central part of the straight line between the two communicating stations.
In this example the aircraft is an Airbus A320 on an Air Corsica flight CCM772V dated 16th September 2016.
The transmitter is France Musique DX/FM913/M on 94.2 MHz at JN23RJ (Marseille). The receiver is call sign F8AIH at JN35AM (Chambėry).
The aircraft crosses the line between Tx and Rx at 09:44:56 UTC at an altitude of 10,957 m on a track of 326°T at a position of 45.13°N 05.95°E. In the You Tube video you can listen to the received signal as the aircraft crosses the transmission line. At the start you hear just noise, but as the aircraft passes you hear the transmission clearly. After the aircraft has passed, there is just noise again.
Here is a link to a map showing both the radio transmission path and the aircraft path.
https://www.dropbox.com/s/ndkk9zulqw6nkfs/Flight%20Path%20Analysis%20CCM772V.png?dl=0
Here is a link to the You Tube video.
https://www.youtube.com/watch?v=1gc0vVk3XBg
Here is a possible WSPR detection 11 minutes later at 09:56 UTC, but with the crowded skies over Europe, it would need a lot more work to be certain. It is a different story in the empty SIO.
Here is a link to the map.
https://www.dropbox.com/s/e815awpuv92cj6j/WSPR%20Cells%2016SEP2016%200956%20Tx%20W7QO%20at%20IL36%20Rx%20DK6UG%20at%20JN49CM%20.png?dl=0
Here is the link to the WSPR data.
https://www.dropbox.com/s/7ewulx86or6pnc2/WSPR%20Cells%2016SEP2016%200956%20W7QO%20at%20IL36.png?dl=0
@Richard. Much obliged. All new to me. I look forward to looking into all this tomorrow.
@David
The internet never sleeps!
@Richard. One day, all knowing, all powerful, the new Deity.
@Richard. Geoffrey Thomas:
https://www.airlineratings.com/news/mh370-new-credible-evidence-location/
@David
Many thanks! I have added a new post with the guest article from Geoffrey Thomas.
@Richard. Geoffrey Thomas again:
https://www.airlineratings.com/news/mh370-wreck-hunter-blaine-gibson-pleads-new-search/
@David
Another great article by Geoffrey Thomas.
I fully support the views of Prof. Pattiaratchi and Blaine Gibson.
Taking the flight analysis based on the satellite data together with the drift analysis which produced so much physical evidence, leads us independently to the same conclusion as to where MH370 will be found.