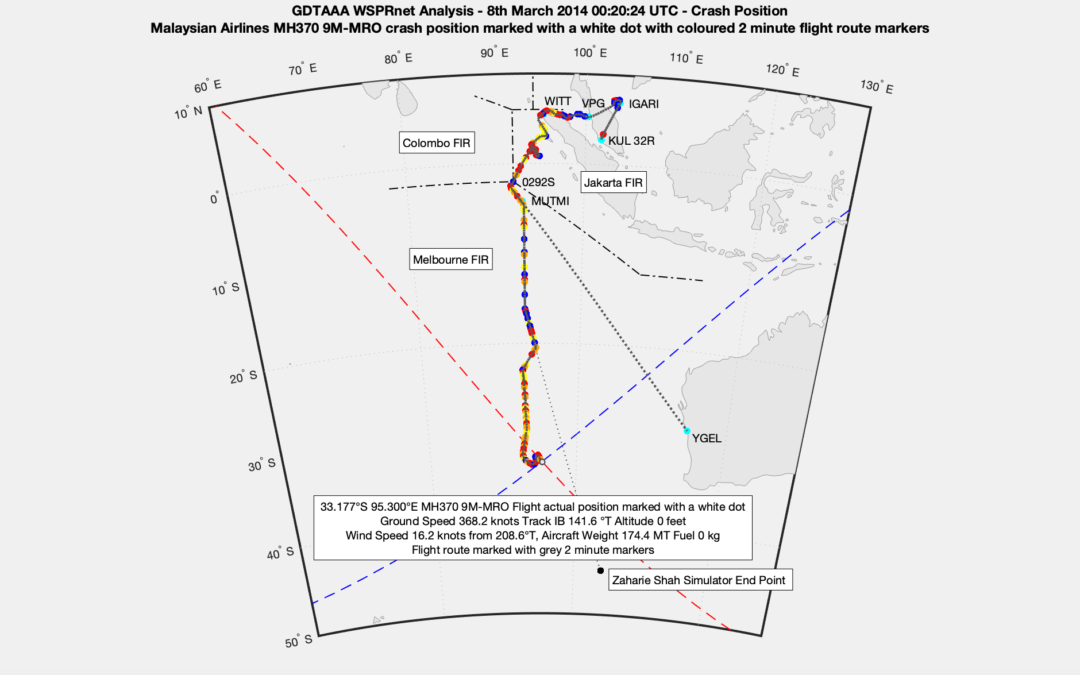
This MH370 flight path report provides the findings every two minutes during the entire flight of MH370 from 7th March 2014 16:42 UTC to 8th March 2014 00:20 UTC. The analysis used the Global Detection and Tracking of Any Aircraft Anywhere (GDTAAA) software based on the Weak Signal Propagation Reporter (WSPR) data publicly available on the WSPRnet website.
This report will be followed up by a technical paper. This second paper will give the technical details of each candidate detection of MH370 using the WSPRnet data and the technical details of the tracking of the MH370 flight path.
This flight path of MH370 has been described in detail with a granularity of two minute steps and accuracy within 18 nm. There are 89 candidate single link progress indicators and 35 candidate multiple link and multiple azimuth position indicators based on the GDTAAA analysis of the WSPRnet data. This results in over 200 WSPRnet links which are candidates for a MH370 detection and tracking.
Combining the Inmarsat satellite data and Boeing performance data with the WSPRnet analysis provides a much more complete view of the MH370 flight path. Further combining the joint Inmarsat/Boeing/WSPRnet analysis result with the Oceanographic drift analysis by Prof. Charitha Pattiaratchi of the University of Western Australia builds confidence because the data and analyses from different independent scientific and engineering domains all point to the same MH370 crash location at 33°S close to the 7th Arc. Blaine Gibson found the majority of the MH370 floating debris items that have been recovered from around the Indian Ocean on the basis of this drift analysis.
The paper (124 pages, 55 MB) can be downloaded here
@All,
Dr. Hannes Coetzee wrote to me today saying that it occurred to him that using the WSPRnet data to detect the presence of an aircraft, and then with some serious post-processing eventually the location of the aircraft, is in principle actually quite similar to how the Total Electron Content (TEC) at a specified point in the ionosphere is determined.
For TEC calculations use is typically made of a dual frequency GPS receiver with one receiver tuned to the course/acquisition (C/A) frequency and the other channel tuned to a restricted or the military channel. Although it is not possible to get data from the restricted channel it is still possible to monitor the PLL control voltage and compare it to the control voltage of the PLL of the C/A receiver. Since the two frequencies differ, the two signals propagate along two distinctly different paths through the ionosphere although they originate from the same source and are received by the same GPS receiver. Some very clever people developed methods to, at the end of the day, calculate the TEC (amount of free electrons/m^3) from the difference in the control voltages. The technique has also been peer reviewed by the scientific community and found to be based on sound physics principles. The results are nowadays universally accepted. The fact that some of my colleagues at SANSA contributed to this technique during the early phases of the development doesn’t make him biased either 😉
Once again GPS was, just like WSPR, never designed for this purpose. (If you ask the original designers of the GPS system if this was possible the answer would also probably be “utter rubbish” or something similar). Also note that in this instance use is also not made of the primary output or purpose of the GPS, but rather a calculated, secondary value. With TEC the results are typically “anchored” with the data generated by an ionosonde. The same logic applies to the WSPRnet analysis. The fine details of how WSPR actually works doesn’t really matter that much, but rather that an anomaly or change in the reported WSPR output can be used to detect a propagation anomaly caused by an aircraft disturbing the communications between two points. Once this disturbance is detected other processes can kick in to do the position location calculations. And once again the WSPRnet position fixes are “anchored” by data from other sources such as the radar tracking of MH370 during the early stages of the flight, the calculated arcs from the Inmarsat data, etc.
Dear Mr. Godfrey
I know this sounds like a crazy idea and you’ve probably already done it, but have you ever tried the following:
Imagine we didnt know anything about Mh370 route at all, meaning that radar was shut off at Kuala Lumpur Airport already. Is it also possible, to reconstruct the KNOWN flight path ( all the way up to that last point over the Andaman sea) by using WSPR Technology? Like doing that naively and comparing it to the real route on the civilian and military radar could actually act as another general test for the capabilities of WSPR Technolgy in terms of finding an aircraft?
Yours Sincerely
Fabian
@Fabian,
I have compared the WSPR flight path to the Civilian radar and it matches.
Unfortunately the Military radar has not been released publicly, so a check is not possible.
There was no radar available over the Andaman Islands.
It is interesting to see on this chart there is or was an end point from Zaharie Shah’s simulator, but somewhat further south. It appears at least in the simulated model he took a more straight line from the midpoint of the WSPR data. On that basis, do you know why he would have come off that direct course and deviated to the left. Potentially avoiding something?
@Duncan Robb,
Welcome to the blog!
The chart in this post is dated 31st December 2021, please use the current chart dated 31st August 2023, which you will find at the following link:
https://www.dropbox.com/scl/fi/tntc327zc4ps4xl2apoji/MH370-Flight-Path-Analysis-Map.png?rlkey=4ixz2oz5lnkzqwrw08heha8fo&dl=0
The reason for the multiple deviations is to avoid a consistent crash location being deduced, if detected by another aircraft in his vicinity and reported with a position, ground speed and track.
@All,
I have analysed data that Rob has supplied regarding his detection of Qantas Flight QF64 from Johannesburg to Sydney on 26JAN2022. Rob was looking at the live WSPR data in real time. Not all this data makes its way into the historic WSPRnet database, but there is more than sufficient data to confirm the detection and tracking of QF64.
At 20:56 UTC there are 4,113 WSPRnet spots in the historic database. The aircraft was a Boeing 789 registration VH-ZNG, which departed Johannesburg Airport at 17:53 SAST and landed at Sydney Airport at 13:46 AEDT. Rob selected particular WSPR spots in the 14 MHz band that were received by VK6QS near Perth Australia as shown in the following table:
https://www.dropbox.com/s/bivq0a71gj7f9qy/wsprspots-2022-01-169%2026JAN2022%202056%20Rx%20VK6QS.png?dl=0
Rob’s WSPR viewer shows in frequency order left to right K4RHG, W4ERJ, KD4OTA, NI5F and W0QV.
https://www.dropbox.com/s/3cu5dzyq4fl1dz0/Rob%20WSPR%20Viewer%2026JAN2022%202056%20UTC%20VK6QS.png?dl=0
I also selected some other WSPR spots in the 14 MHz band that were received by VK4EMM near Brisbane, Australia.
https://www.dropbox.com/s/zg5mwx5v6kb5eek/wsprspots-2022-01-169%2026JAN2022%202056%20Rx%20VK4EMM.png?dl=0
At VK4EMM I see a WSPR Tx from AB5SS and N8MH in addition, but I am missing W0QV, when compared to VK6QS. This aligns with Rob’s WSPR viewer at VK5ARG (which is not available in the WSPRnet historic database) showing in frequency order left to right AB5SS, K4RHG, W4ERJ, KD4OTA, NI5F and N8MH. It appears that the reception of W0QV at VK6QS gets disturbed by N8MH at VK5ARG and at VK4EMM.
https://www.dropbox.com/s/uow6t8959j10sdz/Rob%20WSPR%20Viewer%2026JAN2022%202056%20UTC%20VK5ARG.png?dl=0
The QF64 flight plan as published by FlightAware is as follows:
https://www.dropbox.com/s/y4t4dovneaklans/QF64%20Flight%20Plan.png?dl=0
At 20:56 UTC the position of QF64 was around 300 nm East of the Kerguelen Islands. The flight plan does not follow the great circle path exactly, it follows a path close to the great circle where the best tailwinds are forecast. QF64 is not obliged to follow the flight plan and may be allowed by ATC to deviate north or south to pick up stronger actual tailwinds, when they are better than forecast. The airline’s goal is to find the most economic flight path.
The Qantas operations base in Sydney follow the meteorological conditions en-route and can submit a flight plan amendment using a system called the Dynamic Airborne Rerouting Procedure (DARP). One reason to deviate could be more advantageous winds elsewhere. Other reasons to deviate which may have been pertinent in this case are, of course, weather build ups, but these are rare in the higher latitudes, and fuel temperatures approaching the cold temperature limits, in which case the aircraft will either go faster, request a deviation to a warmer air mass, or both, depending on the situation (source Mike Glynn).
FlightAware estimates the QF64 position around 80 nm south of the great circle and 120 nm south of the flight plan path. FlightRadar estimates the QF64 position on the great circle and 40 nm south of the flight plan path. FlightAware and FlightRadar24 only estimate the current position, speed and track of the aircraft from the data when leaving South African airspace or the great circle path.
The original flight plan indicates that the aircraft is planned at 4803S07233E (48° 3’ S 72° 33’ E) to fly at Mach 0.84 and maintain flight level 370 (37,000 feet). GDTAAA estimates the outside air temperature at 37,000 feet as -48.2 °C. For a Mach 0.84 speed at this temperature, the True Air Speed is 490.81 knots. The track (TRK) towards Sydney is at an initial bearing of 103.95 °T from the estimated position at 20:56 UTC. The wind speed is 114.5 knots from 280 °T, which results in a ground speed (GS) of 604.97 knots and an along-track-wind (ATW) of 114.23 knots. GDTAAA estimates the position of QF64 at 20:56 UTC at 47.31 °S 78.65 °E and around 100 nm north of the flight plan path.
I automated a check of all 4,113 WSPRnet signals at 20:56 UTC and all 3,662 WSPRnet signals at 20:58 UTC against the 500,000 WSPRnet signals in the 3.5 hour timeframe from before and after the detections at 20:56 UTC and 20:58 UTC.
The position on 26th January 2022 at 20:56 UTC is marked by 7 SNR anomalies (by at least one standard deviation) and 1 drift anomaly.
https://www.dropbox.com/s/newrekwbuetkqni/wsprspots-2022-01-169%2026JAN2022%202056%20anomalies.png?dl=0
The position two minutes later at 20:58 UTC is marked by 6 SNR anomalies and 1 drift anomaly.
https://www.dropbox.com/s/wu5ughcgarter6w/wsprspots-2022-01-169%2026JAN2022%202058%20UTC%20anomalies.png?dl=0
The GDTAAA local views at 20:56 UTC and 20:58 UTC are as follows:
https://www.dropbox.com/s/akv7adi7mszwvkg/GDTAAA%20WSPRnet%20QF64%20Analysis%2026JAN2022%202056%20UTC%20Local%20Anomalies.png?dl=0
https://www.dropbox.com/s/apepbcm865dpwa8/GDTAAA%20WSPRnet%20QF64%20Analysis%2026JAN2022%202058%20UTC%20Local%20Anomalies.png?dl=0
Obviously the aircraft was moving a little further south at this time, closer to the Flight Plan path. The QF64 actual flight path is moving towards the Flight Plan path in order to benefit from even stronger tailwinds. I have also depicted the winds on 26th January 2022 at 21:00 UTC, which were at 214 km/h from 280°T at 47.45°S 79.08°E. The winds were increasing to 250 km/h from 275°T at the next Flight Plan point at 49.08°S 81.17°E (4905S 08110E). This would give another 19.4 knots of ground speed at no extra cost.
https://www.dropbox.com/s/f9034cmvjvpevjp/GDTAAA%20WSPRnet%20QF64%20Analysis%2026JAN2022%202100%20UTC%20Winds%2047.45S%2079.08E.png?dl=0
https://www.dropbox.com/s/ue286yznonom6f5/GDTAAA%20WSPRnet%20QF64%20Analysis%2026JAN2022%202100%20UTC%20Winds%2049.08S%2081.17E.png?dl=0
The GDTAAA global views at 20:56 UTC and 20:58 UTC are as follows:
https://www.dropbox.com/s/s74ha4csljzytsq/GDTAAA%20WSPRnet%20QF64%20Analysis%2026JAN2022%202056%20UTC%20Global%20Anomalies.png?dl=0
https://www.dropbox.com/s/6j5ie6g72y4ckm0/GDTAAA%20WSPRnet%20QF64%20Analysis%2026JAN2022%202058%20UTC%20Global%20Anomalies.png?dl=0
“The flight plan does not follow the great circle path exactly”.
Is it not the case that aircraft fly along rhumb lines (lines of constant bearing) rather than great circles ?
@All,
Geoffrey Thomas of AirlineRatings.com has published an article on the recent tracking of Qantas flight QF64 on 26th January 2022 from Johannesburg, South Africa (JNB) to Sydney, Australia (SYD):
https://www.airlineratings.com/news/wspr-tracking-validates-new-mh370-location/
Geoffrey explains that up until now, some have argued that you can use WSPR in real-time to detect aircraft, but you cannot use the historic data. This test shows how the real-time WSPR data aligns with the historic WSPRnet database and both are useful to detect and track aircraft.
ADS-B providers like FlightAware, FlightRadar24, etc. can only estimate where an aircraft is, when out of range of land-based ADS-B receivers on transoceanic flights. They either assume a great circle path or the flight plan is followed, without deviation en-route. Flight operations can submit updates to the flight plan en-route because of more advantageous winds elsewhere, weather build-ups, or cold temperature limits.
GDTAA and WSPR can determine where an aircraft actually is on long transoceanic flights.
I am impressed with the amount of work you are doing and hope it leads to finding MH370.
I have been reviewing your papers and the comments and have a couple of simple questions that will hopefully clear things up at least for me anyway.
The SNR value in the WSPR spot report is a summary value which is an average SNR calculated over the full 2 minute WSPR transmission interval and then rounded to the nearest integer. With all of the detailed information that may have been shown in the waterfall image on the WSPR desktop and in the original transmission data lost in the post processing of the SNR value, how is it possible to use this value in a computation without introducing a significant amount of error?
I your paper “How Can WSPR Help Find MH370” you discuss a WSPR spot at 17:16:00 UTC. On the bottom of page 1 there is an image that shows the aircraft location by a blue spot and the great circle signal path in a thicker blue dash line which passes just below the aircraft position. In the image the aircraft is moving north east and seems to be about 30 seconds past the signal path. In the report the aircraft ground speed is identified as 471.9 knots. At that speed traveling northeast toward IGARI the aircraft would start 3.93 nautical miles, at 17:16:00, and finish at 18.9 nautical miles, at 17:17:54, well beyond the great circle signal path during the 2 minute WSPR transmission interval. It seems evident that some of the signal could be reflected off the aircraft and increase the overall strength of the great circle path signal received by the antenna. How is it possible that an aircraft located that far from the great circle signal path could induce a significant enough negative effect on the signal strength that it could be interpreted from the SNR value in the spot report?
I know you have said you will issue further papers to describe the process and I am hoping can answer these questions in simple terms for all to understand ahead of time.
@Troy,
I have previously communicated on this website that there are a few contributors who are using fake, anonymous or untraceable email addresses. I will not accept comments from fake, anonymous or untraceable emails on this website such as withheld@ or noreply@ or noname@ or any similar variants.
You have continuously used anonymous email addresses.
This website is published under the jurisdiction of the European Union, which expressly forbids the use of anonymous email addresses.
If you resubmit your questions in an open and transparent manner, I will gladly answer.
@All,
We have been asked by a number of people to explain the scientific and technical details of using WSPR to detect and track aircraft in general and MH370 in particular. As previously announced, Dr. Robert Westphal, Dr. Karl Herrmann, Dr. Hannes Coetzee and I plan to publish a paper in mid March 2022, as a response to this request.
I have previously published a WSPR Technical Overview:
https://www.dropbox.com/s/454fh34g1483gcr/WSPR%20Technical%20Overview.pdf?dl=0
Others have asked for an explanation in simple terms for all to understand. There are a number of aspects raised in such a request as:
1. The illumination Time On Target (TOT) of an aircraft flying at cruising speed.
2. The signal energy of any target illumination as opposed to transmission power.
3. The Coherent Integration Time (CIT) of the ionosphere.
4. The WSPR transmission time of 110.484 seconds and cycle time of 120.0 seconds.
5. The Radar Cross Section (RCS) of an aircraft including its wake vortex and exhaust plume.
6. How a WSPR receiver signal digital processing works.
Some of these points have already been explained on the WSPR Technical Overview. None of these points are trivial.
A general history of High Frequency (HF) radio propagation can be found here:
https://www.dropbox.com/s/6dykpaxrmi84t8d/History%20of%20WSPR%20Related%20Research.pdf?dl=0
A cursory glance at the topic of the Radar Equation in the internet can be confusing at first sight:
https://www.dropbox.com/s/beuo0bkhzoh05eo/Radar%20Equations.png?dl=0
We use the following radar equation as proposed by Cervera et al. in their paper titled “Climatological Model of Over-the-Horizon Radar” dated 2017 based on the standard radar equation with additional terms for absorption, focusing and CIT:
https://www.dropbox.com/s/1voc9rkwkxhx14q/Standard%20Radar%20Equation%20with%20additional%20terms%20for%20Absorption%2C%20Focusing%20and%20CIT.pdf?dl=0
Radar is either mono-static (transmitter and receiver in the same location) or bi-static (separate transmitter and receiver) or multi-static (multiple spatially diverse mono-static radar or bi-static radar components). WSPR is a double (transmitter and receiver) multi-static, multi-frequency and coherent system, there are hundreds of independent transmitters and receivers operating at the same time at different frequencies synchronised to universal time via GPS.
When you have a look at the radar equation, you will see there is a term usually denoted R (Range) to the power of +4 or conversely power of -4 depending how the equation is arranged. A longer range is the reason many radars have high power, unless they can compensate power by a higher target illumination time and/or higher integration time. WSPR has both a long illumination time of the target aircraft and a long integration time.
During the flight of MH370 there were a total of over 160 detections of MH370 based on either single or multiple WSPR links at 125 different points in time throughout the 7 hours 38 minutes flight. There were a total of 90 points in time with a single WSPR link, which shows the progress of MH370 along the flight path. There were a total of 35 points in time with multiple WSPR links intersecting, which shows the position of MH370 along the flight path.
The algorithms used to identify candidates, simply reflect the transmission power, the received SNR and assumed noise floor level. The algorithms also reflect the propagation distance effect on SNR to the power – 4. This is a based on an assumed transmitter to aircraft and aircraft to receiver distance in a multi-static WSPR environment, where the range of each leg impacts the signal level by the distance power +2. The algorithm is run over WSPR links in the MH370 timeframe and on other days before and after 7th/8th March 2014 and at the same timeframe. The purpose of the algorithm is to identify candidate detections.
The candidates then have to fit a flight path within the Boeing 777-200ER performance envelope and align with the Inmarsat satellite data. A fit to the Oceanographic drift analysis for 36 floating debris items found in the Indian Ocean from the crash location brings further confidence from an independent scientific discipline.
Here is a simple explanation based on frequently asked questions:
1. Does WSPR work with regard to detecting and tracking aircraft?
WSPR can be used to detect and track aircraft and detect spacecraft or rocket launches or even volcano eruptions. It is possible to use WSPR at any time, where there are good radio transmission conditions. This is what is often called good space weather.
An example is the tracking of a Qantas flight QF64 from South Africa to Australia:
https://www.mh370search.com/2021/12/31/mh370-flight-path/comment-page-2/#comment-1408
Another example is the detection of a SpaceX launch:
https://www.mh370search.com/2022/02/08/spacex-launch/
Another example is the detection of a volcano:
https://www.mh370search.com/2021/12/31/mh370-flight-path/comment-page-1/#comment-1383
2. Are WSPR transmissions limited by noise levels to short distances?
There are currently around 3 million WSPR transmission signals sent, received and recorded in the WSPRnet database each day. Around 500,000 transmissions each day are over a distance of 3,000 km or more. WSPR signals are frequently recorded propagating over distances up to 20,000 km. This is limited by the WSPRnet data recording technology to half way around the globe, but in actual fact is longer than 20,000 km in some cases.
You can download the data at https://www.wsprnet.org/drupal/
Transmission power ranges from 0 dBm (0.001 Watts) to 60 dBm (1,000 Watts) and are typically 30 dBm (1 Watt). To give you a comparison, CISCO found in a 2018 study that IOS devices like the iPhone usually transmit between 9 dBm (0.008 Watts) and 14 dBm (0.025 Watts). The SNR of the WSPR signals received after having propagated over 3,000 km ranges from +29 dB to – 44 dB and are typically -19 dB. At transmission power levels of 10 Watt (corresponding to 10 kW of radar transmission power) as well as at times when the Solar Flux Index (SFI) is greater than 120 you can easily see aircraft detections and track aircraft over thousands of kilometres.
Fortunately the 11-year-long solar cycle 24 was close to its peak in early March 2014 during the flight of MH370 with a high Sun Spot Number (SSN) and SFI of 145.
There is also excellent land and sea clutter suppression, if the target speed is higher than 25 knots due to almost Continuous Wave (CW) operation.
3. Is it possible to use secondary WSPR data from the WSPRnet historic database?
Primary WSPR signals will contain more information than secondary WSPR data recorded in the WSPRnet historic database. Many primary WSPR signals do not make into the secondary historic database.
The WSPR receiver takes 110.484 seconds to receive the 162 symbols in the WSPR protocol. In the remaining 9.516 seconds of the 120 second cycle time the signals are processed. During the 2 minute interval you will usually see the SNR is constantly varying, unless it is an unusually stable signal. Not only the signal level but other parameters such as the signal frequency change, due to multi-path signals or angular scattering by the target aircraft.
During the 2 minute time interval we have different SNRs and different frequencies and the data base just shows an average. Any SNR anomaly is based on the average SNR over the 2 minute cycle. Any drift anomaly is based on the average frequency drift over the 2 minute cycle. The frequency drift has almost nothing in common with the frequency changes in the sub-signals within the main signal. The average drift rate is just an indication that something is going on within the time interval. Signals with a drift greater than ± 4 Hz/minute will not make it into the historic database. A check is made on each drift anomaly to see if that particular WSPR link always shows a non-zero value, in which case the drift anomaly is not used as a candidate aircraft detection.
Conclusion
Detecting and tracking aircraft is possible using WSPR technology. In particular detection and tracking of flight MH370 in March 2014 is possible because of the WSPRnet historic database. The HF ionospheric propagation conditions were at a peak in March 2014 and provide the best possible space weather for an optimum usage of WSPR technology.
We will publish subsequent papers, posts or comments with further analysis as appropriate. A patent application has also been submitted.
The alignment of WSPR historic data, with Boeing performance data, Inmarsat satellite data and the Oceanographic drift analysis of the MH370 floating debris all point to a crash location at 33.177°S 95.300°E.
@Geoffrey Thomas at AirlineRatings.com has published the simple guide to revolutionary MH370 tracking technology:
https://www.airlineratings.com/news/simple-guide-revolutionary-mh370-tracking-technology/
@All,
Rob alerted me this morning to the fact that the Qantas flight from Sydney to Johannesburg was taking a much more northerly route today. There is a very strong jet stream resulting in a headwind of up to 300 km/h for QF63.
According to the QF63 flight plan the flight was due to pass waypoint 3342S06317E (33.70°S 63.28°E). On Friday 11FEB2022 the flight plan showed a much more southerly route via waypoint 5400S06913E (54.00°S 69.22°E) and 5239S06130E (52.65°S 61.37°E) over 2,000 km further south.
According to FlightRadar24 QF63 today is flying close to the flight plan and at 09:08 UTC the position was 33.6955°S 63.1188°E based on satellite data received.
According to FlightAware QF63 today is flying much further south and at 09:07:40 UTC the position was 39.5417°S 62.3225°E based on the great circle path to Johannesburg Airport from the last ADS-B data received:
I have shown links to both sources in screenshots below:
FlightRadar24: The time in UTC is in the top right corner, the position is in the bottom left corner:
https://www.dropbox.com/s/1z714zthr41qm08/FlightRadar24%20QF63%20SYD-JNB%2013FEB2022%200908%20UTC.png?dl=0
FlightAware: The time in CET (subtract one hour for UTC) and the estimated position is at the bottom of the table:
https://www.dropbox.com/s/9l3p3c6cj0jtv2g/FlightAware%20QF63%20SYD-JNB%2013FEB2022%200907%20UTC.png?dl=0
These two positions are 20 seconds apart in time, but 652.6 km apart in position.
@All,
First Mike Exner complains “it does not seem feasible to me that an aircraft could be detected in the middle of the Southern Indian Ocean”:
https://www.dropbox.com/s/tmxekrxr042p096/Mike%20Exner%2014MAY2021.jpg?dl=0
Now Don Thompson complains why we are not tracking “aircraft operating over readily trackable routes rather than the many obscurant exercises”.
https://www.dropbox.com/s/umn79iyemej1q4d/Don%20Thompson%20Comment%2012FEB2022.png?dl=0
Maybe we are tracking aircraft in the Southern Indian Ocean because that is where MH370 ended up. We are doing what Don Thompson complains about, in order to answer what Mike Exner complains about.
“Then they say you are unimportant”
@All,
Don Thompson, a fellow member of the IG, published an analysis of my comment regarding detecting and tracking QF64 on 26JAN2022 at 20:56 UTC and 20:58 UTC. He concluded that my flight path and the position given for QF64 was not correct and the flight path accuracy was 90 nm off the planned track:
https://www.dropbox.com/s/u73fub6q75e7k3w/Don%20Thompson%20QF64-Real-vs-GDTAAA.png?dl=0
In my original comment, I clearly showed that QF64 was north of the planned flight path:
https://www.mh370search.com/2021/12/31/mh370-flight-path/comment-page-2/#comment-1408
In particular, I included the following diagram with a scale showing QF64 around 83 nm north of the planned flight path:
https://www.dropbox.com/s/apepbcm865dpwa8/GDTAAA%20WSPRnet%20QF64%20Analysis%2026JAN2022%202058%20UTC%20Local%20Anomalies.png?dl=0
Don Thompson misses the point that QF64 was following a track further north than planned to take advantage of better tail winds. Don Thompson plots the waypoints from the flight plan and then claims that these are ADS-C position reports (without showing the position reports or giving any source for his ADS-C data). Don Thompson only gives two points at 20:19 UTC and 20:24 UTC, but not at the relevant times of 20:56 UTC and 20:58 UTC. The distance between these two points at 20:19 UTC and 20:24 UTC is 97.71 km, which is covered in 5 minutes and implies an average ground speed of 633.1 knots
Don Thompson fails to mention that FlightRadar24 and FlightAware give very different positions at 20:56 UTC and 20:55:45 UTC respectively. Don Thompson fails to mention that his data does not align with the time scale around 20:56 UTC.
https://www.dropbox.com/s/6pnwlif290odowt/Don%20Thompson%20Reality%20Check.pdf?dl=0
Don Thompson also fails to mention that the outside air temperature at 20:19 UTC at his purported position and an altitude of 37,000 feet (source flight plan) was -55.7 °C (source GDAS) and the aircraft was flying at Mach 0.84 (source flight plan), which gives a True Air Speed (TAS) of 482.5583 knots. The wind speed was 119.8704 knots and wind direction from 285°T (source GDAS). The ground speed was therefore 602.3801 knots on a track with an initial bearing of 103.5394 °T and a lot slower than Don Thompson implies.
Obviously Don Thompson thinks GDTAAA, FlightRadar24, FlightAware and GDAS are all wrong. Since the UGIB paper on MH370 also uses GDAS data and the same proven interpolation method, then Ulich, Godfrey, Iannello and Banks must all be wrong as well. In fact it appears that everybody is wrong except Don Thompson.
@All,
In an official message from the ATSB they have again offered their support for my work on WSPR. They confirm that they have taken my WSPR work to date seriously enough to revisit the underwater search data.
The ATSB message is encouraging. Whether WSPR pans out or not, I think they recognize that your analysis does yield an area to be [re]examined to a reasonable size. One that they seem to take seriously, since the alternative seems to be brute-force outward and northward, potentially years of work for OI or their successors.
Why try to search around Australia again ? If the Pilot want to go to Australia, He would turn to go right, straight below straight to Australia, the easy way.
What I thought, The Pilot want to RTB, from Last Radar Primary Contact at 02:22 MYT, near 370km from Penang Island. Between Andaman Sea and Strait Malacca
Should be more focusing, searching from there.
Let Us think what if the Pilot want to RTB, what would be the Pilot should follow the official routes to where ? Point it in there.
@KIN,
Welcome to the blog!
We know that MH370 flew for 7.6 hours until fuel exhaustion. There is no evidence from the Inmarsat satellite data, Oceanographic drift data of the 36 items of MH370 floating debris recovered or the WSPRnet data that the pilot attempted to return to base.
MH370 ended up in the southern Indian Ocean at 33.177°S 95.300°E, which is 1,993 km West of Perth, Australia.
@All,
Geoffrey Thomas won the award for the Best Breaking News story at the Aviation Media Awards for his story, ‘MH370: Probable location found with revolutionary tracking’, which revealed a new technology that promises a precise location for the missing Malaysia Airlines 777 at the Singapore Airshow today:
https://bit.ly/3uUhLXO
@All,
Fellow IG member Duncan Steel sent me the following link to a media story on using WSPR to help find MH370:
https://www.news.com.au/travel/travel-updates/incidents/new-technology-could-hold-key-to-mh370-disappearance/news-story/cd49b64358cd87b2828fb0b494ec772d
@All,
A similar story in the NZ Herald:
https://www.nzherald.co.nz/world/new-technology-could-hold-key-to-mh370-disappearance/PD7XR4LBIDKO6YWMHRCNFGG7DE/
@All,
The official statement from the ATSB is more measured and cautious:
https://www.atsb.gov.au/media/news-items/2022/statement-on-mr-richard-godfrey-s-analysis-of-the-location-for-missing-aircraft-mh370/
First we will publish our paper in mid March, then our work can be more widely reviewed. Only then does it make sense to consider with all parties concerned a further underwater search in the area I have identified.
@All,
Geoffrey Thomas of AirlineRatings.com published the following article:
https://www.airlineratings.com/news/australian-investigators-reviewing-data-light-godfrey-mh370-location/
@All,
There is lot of information and misinformation about MH370, GDTAAA and WSPRnet and any possible further underwater search in the media and from certain detractors.
My paper titled “GDTAAA MH370 WSPRnet Analysis – Flight Path Report” was published on 31st December 2021.
Our paper titled “GDTAAA MH370 WSPRnet Analysis – Technical Report” is planned for publication in mid March 2022.
For the record …
Summary:
The ATSB are reviewing the sonar data in the 40 nm radius area I have identified.
The ATSB are reviewing my papers on GDTAAA and WSPRnet.
The ATSB are co-ordinating with Ocean Infinity and Prof. Simon Maskell (Liverpool University advisor to Ocean Infinity) on both the Ocean Infinity review of the sonar data and Prof. Maskell’s review of my paper on GDTAAA and WSPRnet.
Key Facts:
1. The ATSB Chief Commissioner Angus Mitchell “is taking a keen interest in my ongoing WSPRnet work and papers.”
2. The ATSB have decided to “request Geoscience Australia to re-examine the underwater sonar data collected during the ATSB-led search within my 40 nm radius.”
3. Ocean Infinity are re-examining the underwater sonar data collected during the Ocean Infinity-led search within my 40 nm radius.
4. Ocean Infinity are reviewing my latest paper on WSPRnet and the MH370 flight path.
5. Prof. Simon Maskell of Liverpool University and advisor to Ocean Infinity on MH370 is reviewing my work on WSPRnet and the MH370 flight path.
6. The ATSB are informed of my communication with Prof. Simon Maskell, which they noted with “great interest”.
7. The ATSB have reviewed my latest paper on WSPRnet and the MH370 flight path and asked some detailed questions and made some clarifications, which I have responded to in full.
8. The official announcement by the ATSB on my work can be found at the following link:
https://www.atsb.gov.au/media/news-items/2022/statement-on-mr-richard-godfrey-s-analysis-of-the-location-for-missing-aircraft-mh370/?fbclid=IwAR0ak68MD7cqd3cmDVrHARveudVnfMC0UlFRkw8TysBMXgeuvPbpjGrH7jg
9. I have thanked the ATSB for their official statement and strong support regarding my work on MH370 and welcome any further peer reviews.
@All,
A new article by Geoffrey Thomas at AirlineRatings.com:
https://www.airlineratings.com/news/passenger-news/godfrey-clarifies-mh370-wsprnet-misinformation/
@All,
The media release by the Malaysian Ministry of Transport:
https://www.dropbox.com/s/fa6t9a2g6wdzksl/SIARAN%20MEDIA%20MOT%20-%20RESPON%20TERHADAP%20DATA%20BAHARU%20BERKAITAN%20LOKASI%20MH370%20-%2018%20FEB%202022.pdf?dl=0
The Malaysian Government statement refers to “credible evidence” and new “credible evidence”.
Presumably this includes credible new interpretations of old data (eg WSPR data from 2014)
While a lot of police and media attention was given to the pilot’s faulty flight simulator, very little official or media attention seems to have been given to MH370’s faulty Panasonic 3000i in-flight entertainment system.
The flight path suggests that everything was going according to schedule for the first forty minutes of the flight, until the pilot monitoring, Captain Zaharie Shah, failed to contact Ho Chi Minh ATC.
Could it be that the plane was not configured to support a large number of state of the art laptops, phones etc all charging or being used at the same time, and that this might, after forty minutes, have overloaded the in-flight entertainment system, together with its associated communications software?
Is it known, for example, whether, officially or unofficially, there were any “Boeing Black” secure smart phones on board? (The Boeing Black was a collaboration between Boeing and Blackberry)
https://en.wikipedia.org/wiki/Boeing_Black
@All,
Here is a link to the latest 60 Minutes documentary on MH370:
https://youtu.be/Jq-d4Kl8Xh4
Hi Richard,
It’s very interesting work that you’ve done here. I don’t have the expertise to do a deep dive into your analysis, but can understand conceptually what you’re doing with these radio signal data to map out the path of MH370. I hope this will help solve this puzzle for the families involved and the global community.
In your interview on 60 minutes, you had mentioned that you’ll have gone to the crash site you predicted if you had a couple of million to do the search. I was wondering if you had thought about crowdfunding the ‘money to do the search?
Given global interest in the crash, it may not be difficult to raise the money needed for the search assuming the Malaysian or Australian government is unwilling to proceed.
@KT Tan,
Welcome to the blog!
Several other commenters have raised the idea of crowdfunding.
I prefer to first wait and see, what the authorities decide.
@Richard
Thank you I just watched it !
Excellent and Beautiful !
SEARCH ON !!!
Hi Richard,
In regards to determining point of fuel exhaustion and final glide distance, updated based on your WSPR positions, has this been done?
And is it likely that aircraft altitude could be determined from WSPR SNR data?
We could get fuel burn rate from the WSPR position/speed data, by running the flight path simulation at different altitudes FL350, 370 etc) to see which cruise altitudes fit with the last WSPR point and estimates of no remaining fuel. From that we can re-run the simulation to get a more accurate final position.
Please msg me if you would like some assistance with this.
(B777 pilot / engineer)
@Cameron S,
Welcome to the blog and many thanks for your offer of help!
I can confirm that in regards to determining point of fuel exhaustion and final glide distance, updated based on the WSPR positions, that this analysis has been done.
We have the engineering data for 9M-MRO from a long haul flight just prior to MH370. This gives a very accurate picture of the fuel rate at different speed schedules and flight levels. I have a detailed simulation of the MH370 flight which includes the fuel burn en-route for every minute along the flight path, which includes the position, altitude, outside air temperature, Mach, TAS, wind speed and direction, ground speed, ∂SAT, PDA and fuel tank levels (left and right).
@All,
Comment on solving the mystery of MH370 by Richard de Crespigny a former Qantas Captain:
https://www.youtube.com/watch?v=olDA7QR-vO0
Richard as pilot-in-command of Qantas Flight 32 was widely praised for his handling of an emergency where an Airbus A380 suffered an un-contained engine failure that resulted in severe damage to much of the aircraft, triggering dozens of ECAM warnings, and puncturing the fuel tanks. The crew managed to safely land the plane at Changi Airport in Singapore.
@All,
Comment on solving the mystery of MH370 by David Griffin an Oceanographer with the Commonwealth Scientific and Industrial Research Organisation (CSIRO) which is Australia’s National Science Agency:
https://www.youtube.com/watch?v=xc_6ZJkYGdM
David kindly shared all his data with me regarding the modelling of the drift of the MH370 floating debris in the southern Indian Ocean. I wrote up my findings as a data analyst, but not an Oceanographer, in a paper which I published on this website:
https://www.mh370search.com/2021/01/21/mh370-debris-drift-analysis/
In that analysis over a year ago and before the latest WSPRnet findings, I concluded the MH370 crash location was 34.13°S ± 1.06° near the 7th Arc at a longitude around 93.98°E and the search area is defined as a circle with a radius of 65 nm centred on the crash location. The latest estimate of the crash location at 33.177°S 95.300°E aligns with the overall data from Boeing, Inmarsat, WSPRnet and Oceanographers.
Thank you for your hard work and persistence. I am intrigued by the direction changes along the way. Do you have any theories why it flew to the Jakarta, Colombo and Melbourne FIRs and then pointed to Geraldton Airport in Australia? Does it match the simulated flight? Does it provide a way to help orient it for the eventual turn south? Or does it indicate Australia as an intended destination before a change of heart? I am also intrigued by the temporary change to full speed. My armchair theory is that the pilot was aiming for the simulated destination but realized it wasn’t going to happen and aimed for a backup location.
@Paul Neyrinck,
Welcome to the blog!
“My armchair theory is that the pilot was aiming for the simulated destination but realised it wasn’t going to happen and aimed for a backup location.”
That could well be correct.
Retrieving the Flight Data Recorder will show exactly where the pilot in command was heading.
Hi Richard!
I found your work through the 60min Youtube video.
Amazing work!
I had no idea, that such a Network of RX/TX is in operation.
I was a CB HAM operator in my youth time, doing DX all over Europe when space weather permitted.
As a private pilot the story of MH37 was always shocking, yet fascinating to me.
I will follow up here in this interesting blog for new developments.
Thanks again!
@Herwig,
Welcome to the blog!
And feel free to check in from time to time for new developments.
Fascinating work. The last significant event was the discovery of the flaperon.
This may well work out to be the next one.
The few turns and the extended holding pattern, is there sufficient information to know if it is within the realm of autopilot control?
@Nik Huzlan,
Welcome to the blog!
It appears there was an active pilot using autopilot and auto throttle control.
I cannot tell whether the holding pattern was flown using waypoints or the HDG/TRK select.
@All,
Here is a link to the latest Sky News Australia documentary on MH370:
https://www.youtube.com/watch?v=CcIwt2bRDkc
@All,
Ocean Infinity CEO Oliver Plunkett has announced a new search for MH370. Here is a link to an article by Geoffrey Thomas of AirlineRatings.com:
https://www.airlineratings.com/news/ocean-infinity-commits-new-search-mh370-2023-2024/
Amazing work
@Anthony Geinopolos,
Welcome to the blog and many thanks for the kind words!
Wow 2023, hopefully they would find it this time. Incredible work Richard
@Cory Leong,
Welcome to the blog! I believe that Ocean Infinity with their new plan and new proposal to the authorities will find MH370. They have the technology, experience and skills required.
Richard , thank you for being exactly who you are . Love your deep thinking . Do you think the parts of the plane that actually did manage to hit bottom on the ocean floor are probably scattered at least a mile ?
@Barb R,
Welcome to the blog!
The ocean floor debris field will be similar to that of AF447, which was around 600 m x 200 m:
https://www.dropbox.com/s/xuwhrmnmiukyjy0/AF447%20Debris%20Field.png?dl=0
Great scientific work @Richard
@Majidin,
Welcome to the blog and many thanks for the kind words!
Thank you , no wonder you are valiant in trying to help , lots of lives lost when planes drop from the sky .
With the ability for WSPR to track large objects only above a certain hight, and not ships on the water for example, why could the plane have not descended past this WSPR trackable height and flown for a while under it, ending up a long distance (or at least a little bit) away from the predicted crash sight. I have a similar question for the arc tracking, as it only pings every hour, so why could the plane not be some distance away from the 7th arc and have crashed say 50 minutes after the 7th arc ping. That way, it would be far away but a new 8th arc would not yet have contacted it.
@Milo Donovan,
Welcome to the blog!
Aircraft have been detected using WSPR technology at altitudes as low as 2,000 feet. A Boeing 777-200 ER usually cruises at an altitude above 30,000 feet. The reason why a large aircraft does not fly for long at a low altitude below say 2,000 feet is because the air is much denser which requires much more fuel and a slower air speed. A typical air speed is 208 knots at low altitude as opposed to around 500 knots at cruising altitudes.
There would be insufficient fuel and speed to reach any of the Inmarsat satellite arcs later in the flight. The reason why most analysts believe that MH370 did not fly on until nearly reaching a 8th Arc is that the rate of descent at the 7th Arc was around 15,000 feet per minute. It is possible that the aircraft recovered from such a dive but the 36 items of debris recovered so far show considerable damage and indicate a high speed impact.
It is also clear that an active pilot would not have known about either WSPR or Inmarsat satellite tracking and the need to fly at a low altitude.
Greetings Mr. Richard
I’ve been curious concerning the WSPR with regard to locating and finding
the Boeing 777 final resting place is what was mentioned in your report that it was 28km from being discovered and what I’m curious of is in the pinpointed picture of seabed terrain that red dot of probable MH370 location is of 5,000m deep and the area looks really remote and do you think that the environment where the wreckage is located in the broken ridge will later reveal why there where no chances of finding the 777’s wreckage during the 2016 search?
it is believed that the terrain consisting of the plateau and the volcano was visited
but the wreckage sounds like miles away from discovery? and what could possibly?
be secreting the wreckage from discovery? the complexity of the environment and I
even think it is when the parts of the Boeing reaching that remote part of the 5,000
meters depth next to the plateau and the volcano.
@ Faisal,
Welcome to the blog!
Most analysts are agreed that the underwater terrain makes searching for MH370 wreckage on the sea floor very challenging and to get close to 100% coverage is very difficult, but not impossible.
There were areas where a deep tow vehicle had to be raised and lowered to negotiate or avoid seafloor terrain. The problem is similar for an autonomous underwater vehicle, which looks ahead at the topography and will ascend in good time to avoid any collision with the underwater terrain. This type of activity normally occurred around large seamounts or fracture zones. These areas were marked anywhere the underwater vehicle altitude was over 300 m from the sea floor. This requires a further pass or multiple passes following the contour line of terrain at a relatively constant altitude to complete the coverage.
There were areas where the seafloor terrain masked the area behind it. This is typically caused by a geologic obstruction which blocks the sonar signal from going further, or a high down slope gradient, such as the edge of a cliff, where no return signal was detected. This requires a further pass or multiple passes in different directions to complete the coverage.
There were sometimes data gaps between two adjacent lines of sonar data using a valid range of 1,000 m nominally. These were rare but occurred if the ship had large deviations from the planned line or subsea currents shifted the deep tow vehicle position.
In summary you need to be within 1,000 m laterally and 300 m vertically without any obstructions and without any equipment failures. Of course, you can revisit an area until you are satisfied you have a good coverage. A debris field will also cover a large area and you only have to initially detect a single aircraft component that stands out against the surrounding geology. A future underwater search has the advantage that underwater detection technology is improving all the time.
Once the underwater wreckage of MH370 has been found, it will be very clear as to why the aircraft was not found in earlier searches in 2016 or 2018.
In my view, MH370 crashed between 00:22 UTC and 00:27 UTC. At 00:22 UTC the position from the WSPRnet analysis was estimated to be 30.00°S 98.70°E. At 00:26 UTC the position from the WSPRnet analysis was estimated to be 30.57°S 98.75°E. The crash location is further north than previously thought and up to 53 nmi South East of the 7th Arc at sea level.
Many analysts agree with the DSTG study by Ian Holland showing that at 00:19:37 UTC MH370 was in an accelerating descent of at least 14,800 fpm. If there was an active pilot, it is possible that he managed to recover from this dive.
The IFE setup message was not received as expected at 00:21.06 UTC, but there are 4 possible reasons given by the ATSB as to why this transmission was not sent or not received by the Inmarsat satellite communication system:
(a) The IFE system was selected off from the cockpit overhead panel at some point after the 18:25 logon.
(b) The IFE and/or SDU unit lost power due to the APU flame-out following fuel exhaustion.
(c) The IFE and/or SDU becoming inoperative (due to impact with the water) before the connections could be set up.
(d) An unusual aircraft attitude breaking the line-of-sight to the satellite and the aircraft transmission not received by satellite.
I am mindful of the absence of the IFE connection expected at around 00:21:06 UTC (approximately 90 seconds after 00:19:37 UTC) as well as the analysis of the BFO data by Ian Holland of the DSTG, which shows an accelerating rate of descent of between 14,800 fpm and 25,300 fpm at 00:19:37 UTC. Both these facts may well individually set a limit for the maximum possible distance of the crash location from the 7th Arc, but it is prudent to check further out in time in case there was another reason for the absence of the IFE connection or somehow a recovery from the accelerating rate of decent.
I analysed the WSPR links in an ever widening circle centred on the last estimated position up until 8th March 2014 01:00 UTC. There was very likely a WSPRnet detection at 00:22 UTC and a possible WSPRnet detection at 00:26 UTC, but none thereafter.
The MH370 crash area based on the WSPR analysis is shown in the diagram in the following link and is marked in opaque light blue. The MH370 track is marked in light blue:
https://www.dropbox.com/s/nt6rg0dq7liffkn/SC%20Track%2023042018.pdf?dl=0
The position of the Ocean Infinity vessel Seabed Constructor on 23rd April 2018 is marked SC and the ships track is marked in red. The locations of AUV and ROV deployments are also marked. The underwater search area is marked in opaque white and is relatively narrow at around 22 nmi either side of the 7th Arc because of the high rate of MH370’s descent at the end of flight and the absence of the IFE setup transmission.
As you can see Seabed Constructor was close to the hypothesised MH370 crash area and only 33 km (17.8 nmi) west of the start of the crash area at 30.00°S 98.70°E. Unfortunately there is hardly any over lap between the underwater search area and the MH370 crash area based on the WSPR analysis. Ocean Infinity’s search capability has increased significantly with the latest technology and they are able to cover a larger area far more quickly and effectively than in 2018.
I appeal to all official and independent investigators to work together to support a new underwater search and help solve the mystery of MH370.